
PLC 控制步进电机的实例(图与程序)
·采用绝对位置控制指令(DRVA),大致阐述 FX1S 控制步进电机的方法。由于水
平有限,本实例采用非专业述语论述,请勿引用。
·FX 系列 PLC 单元能同时输出两组 100KHZ 脉冲,是低成本控制伺服与步进电机
的较好选择!
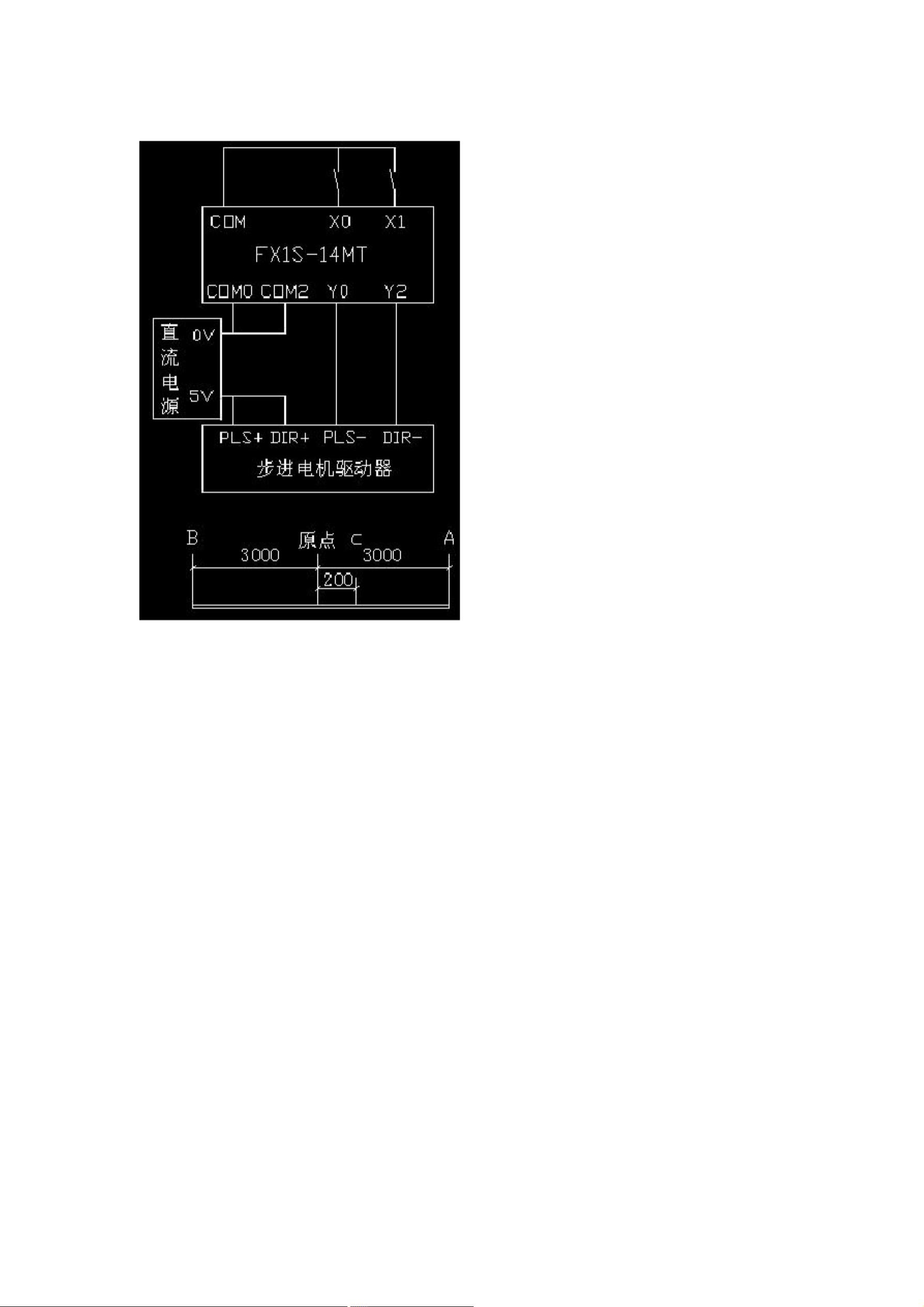
·PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR-为步进驱动器的方向信
号端子。
·所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存
放于 32 位寄存器 D8140 里。当机械位于我们设定的原点位置时用程序把 D8140
的值清零,也就确定了原点的位置。
·实例动作方式:X0 闭合动作到 A 点停止,X1 闭合动作到 B 点停止,接线图与
动作位置示例如左图(距离用脉冲数表示)。
·程序如下图:(此程序只为说明用,实用需改善。)
·说明:
·在原点时将 D8140 的值清零(本程序中没有做此功能)
·32 位寄存器 D8140 是存放 Y0 的输出脉冲数,正转时增加,反转时减少。当正
转动作到 A 点时,D8140 的值是 3000。此时闭合 X1,机械反转动作到 B 点,也
就是-3000 的位置。D8140 的值就是-3000。
·当机械从 A 点向 B 点动作过程中,X1 断开(如在 C 点断开)则 D8140 的值就是
200,此时再闭合 X0,机械正转动作到 A 点停止。
·当机械停在 A 点时,再闭合 X0,因为机械已经在距离原点 3000 的位置上,故
而机械没有动作!
资源评论


xxpr_ybgg
- 粉丝: 6805
- 资源: 3万+









最新资源
- C#使用Snap7读写西门子全糸列PLC,非常方便,通信稳定可靠,是C#上位机工程师的通讯利器,布尔字符浮点数整数字节都可读写
- 51单片机智能浇花器 C程序、proteus仿真、报告、仿真操作视频 支持滑动变阻器代替湿度传感器 支持1602显示实时温湿度和上下阈值 支持按键设置上下限阈值 支持声光报警、电机驱动模拟浇水 当湿
- 水库调洪、同频率放大洪水过程程序
- 卡尔曼滤波与AHRS滤波对比实验 matlab程序
- 循环载荷试验获取背应力,有效应力 程控电子万能试验机
- 数字图像处理二维码识别 python+opencv实现二维码实时识别 特点: (1)可以实现普通二维码,条形码; (2)解决了opencv输出中文乱码的问题 (3)增加网页自动跳转功能 (4)实现二维
- 一种改进的蚁狮优化算法 改进的ALO算法【matlab代码】 - 在原始ALO算法的基础上添加了两种改进策略 - 改进1:将原先的间断性边界收缩因子变为连续性边界收缩因子,从而增强算法的遍历性 - 改
- MMC低频运行 高频信号注入方法 抑制子模块电容电压波动 模块化多电平变器 MATLAB simulink仿真 5Hz 10Hz 20Hz等低频运行 低频运行双闭环控制 双正弦波注入 双方波注入等
- 基于Django的用户协同过滤算法的推荐系统,Python,前后端交互,MySQL,自由拓展度高,内置电影首页,根据自己需求任意更改,根据标签推荐,根据用户喜好电影推荐,注册登录完善,明文加密,coo
- 西门子1200水处理程序+西门子触摸屏程序,V16打开学习程序,可仿真实验 plc程序包含功能块,功能块为scl编写, 内含模拟量算功能块+滤波功能块+时间算功能块+modubus tcp通讯程序 有
- MATLAB丨热带太平洋丨SST丨表层温度梯度锋
- MATLAB代码 风光场景生成 场景削减 概率距离削减法 蒙特卡洛法 MATLAB:基于概率距离快速削减法的风光场景生成与削减方法 参考文档:《含风光水的电厂与配电公司协调调度模型》完全复现场景削减
- 利用backstepping算法设计的移动机器人轨迹跟踪控制器matlab源代码,包里面有四种轨迹,分别是直线、圆、椭圆和不规则轨迹,供需要的朋友学习参考
- 开断潮流,基于牛顿拉夫逊潮流计算结果,引入灵敏度矩阵和雅可比矩阵计算支路功率对故障点注入功率的灵敏度,进而计算故障后所有支路潮流的修正量
- 双馈风力发电机模型研究(DFIG),simulink模型 给定风速变化,电流与电压等波形效果完美
- MATLAB代码:含风光柴储微网多目标优化调度 关键词:微网调度 风光柴储 粒子群算法 多目标优化 参考文档:《基于多目标粒子群算法的微电网优化调度》 仿真平台:MATLAB 平台采用粒子群实现求解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


