
1 引言
减摇鳍装置是一种最常用的主动式横摇减摇装置,一般分为固定式和收放式两种。固定
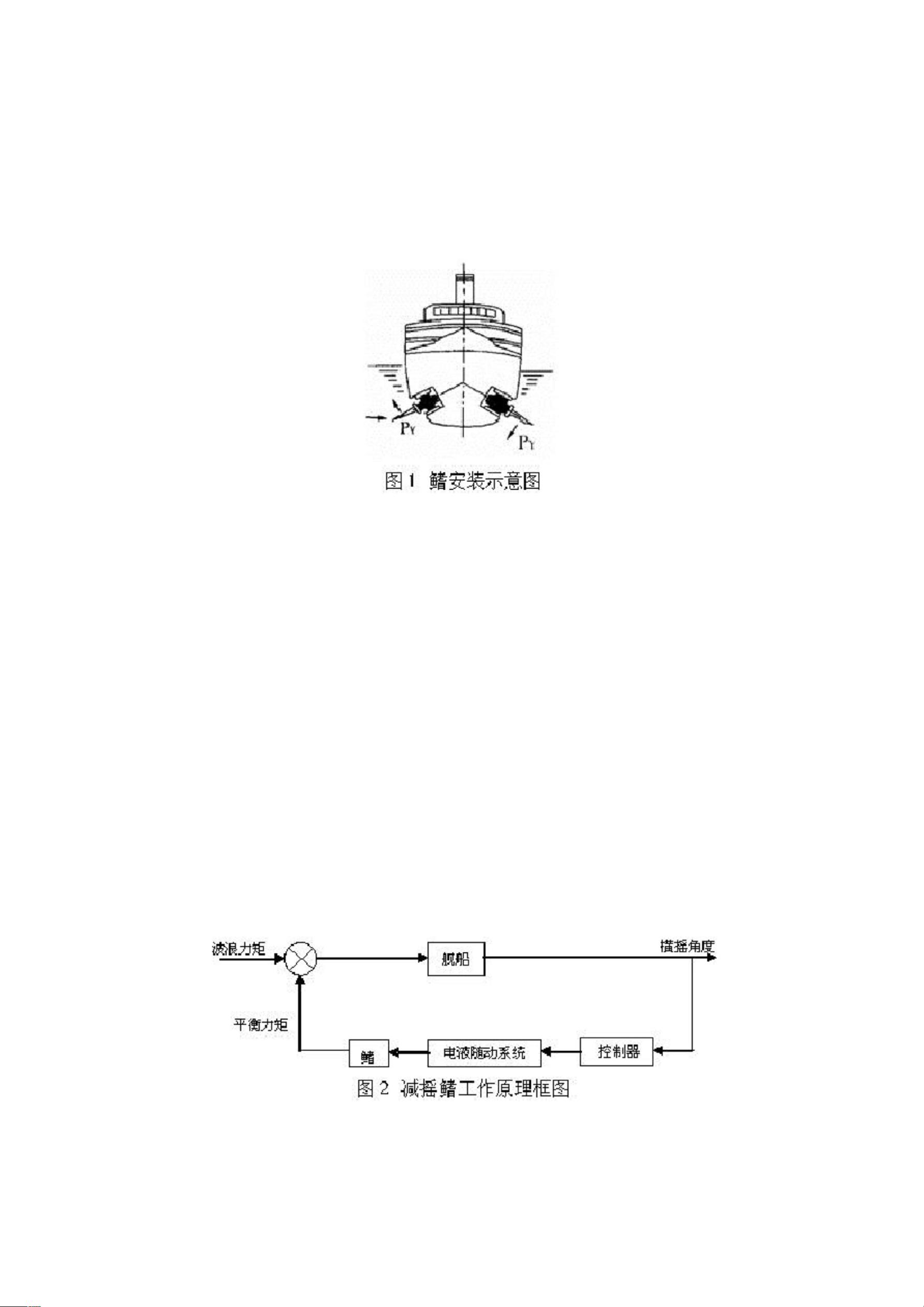
式减摇鳍的鳍从两弦伸出船体,安装于水线下的一定深度处,如图 1 所示。减摇鳍减摇效果
取决的因素很多,其中控制系统的性能优劣是其关键因素之一。
可编程控制器(Programmable Logic Controller,简称PLC)是将计算机技术、通信技术
和自动控制技术结合在一起的自动控制设备,具有可靠性高、体积小、功耗低、抗干扰能力
强等诸多优点。PLC 在减摇鳍控制系统中应用,可保证其在温度和湿度都较高、空间较小、
工作环境恶劣的机舱里稳定、可靠、长时间连续地工作。
2 减摇鳍装置工作原理
减摇鳍装置作为一个自动控制装置,它可以分成三部分:鳍机械组合体,驱动鳍的随动
系统和控制系统部分。当舰船在风浪中航行产生横摇时,控制系统通过角速度陀螺仪采得舰
船横摇的信息,通过一系列的运算处理后得到鳍角控制信号,经放大后送到电液随动系统,
电液随动系统根据鳍角控制信号驱动鳍按指定动作运行。船体两边的鳍在液压驱动力和水动
力的共同作用下,产生稳定力矩来平衡波浪对舰船产生的扰动力矩,以达到减摇的目的。该
稳定力矩和波浪的扰动力矩大小尽量相同,方向却正好相反,称之为平衡力矩。减摇鳍装置
工作原理框图如图 2 所示。
3 减摇鳍控制系统结构和程序设计
资源评论













