

机械优化设计报告(4)
基于 MATLAB 的鲍威尔法求极值问题
姓名:xxx 学号:xxx
(北京理工大学机械与车辆学院车辆工程,北京 100081)
摘要:无约束优化方法主要有七种,按照求导与否把这些方法分为间接法和直接
法。牛顿法的成败与初始点选择有极大关系,其可靠性最差;坐标轮换法、单纯
形法和最速下降法对于高维优化问题计算效率很低,有效性差;由于编制变尺度
法程序复杂,其简便性不足。综合考虑后,鲍威尔法、共轭梯度法具有较好的综
合性能。本文首先对鲍威尔法的原理进行阐述,根据其迭代过程给出流程图,并
编写 MATLAB 程序。最后用此 MATLAB 程序求解实际的极值问题,并对求解结果进
行简要分析。
1. 鲍威尔法的基本思想
1.1 其他优化方法对鲍威尔法形成的影响
通过对鲍威尔法的学习,可以很明显看出来其迭代思想中汲取了其他几种优
化方法的核心思想。为了更全面、更深入的学习鲍威尔法,很有必要对其他有影
响的优化思想进行学习和梳理。
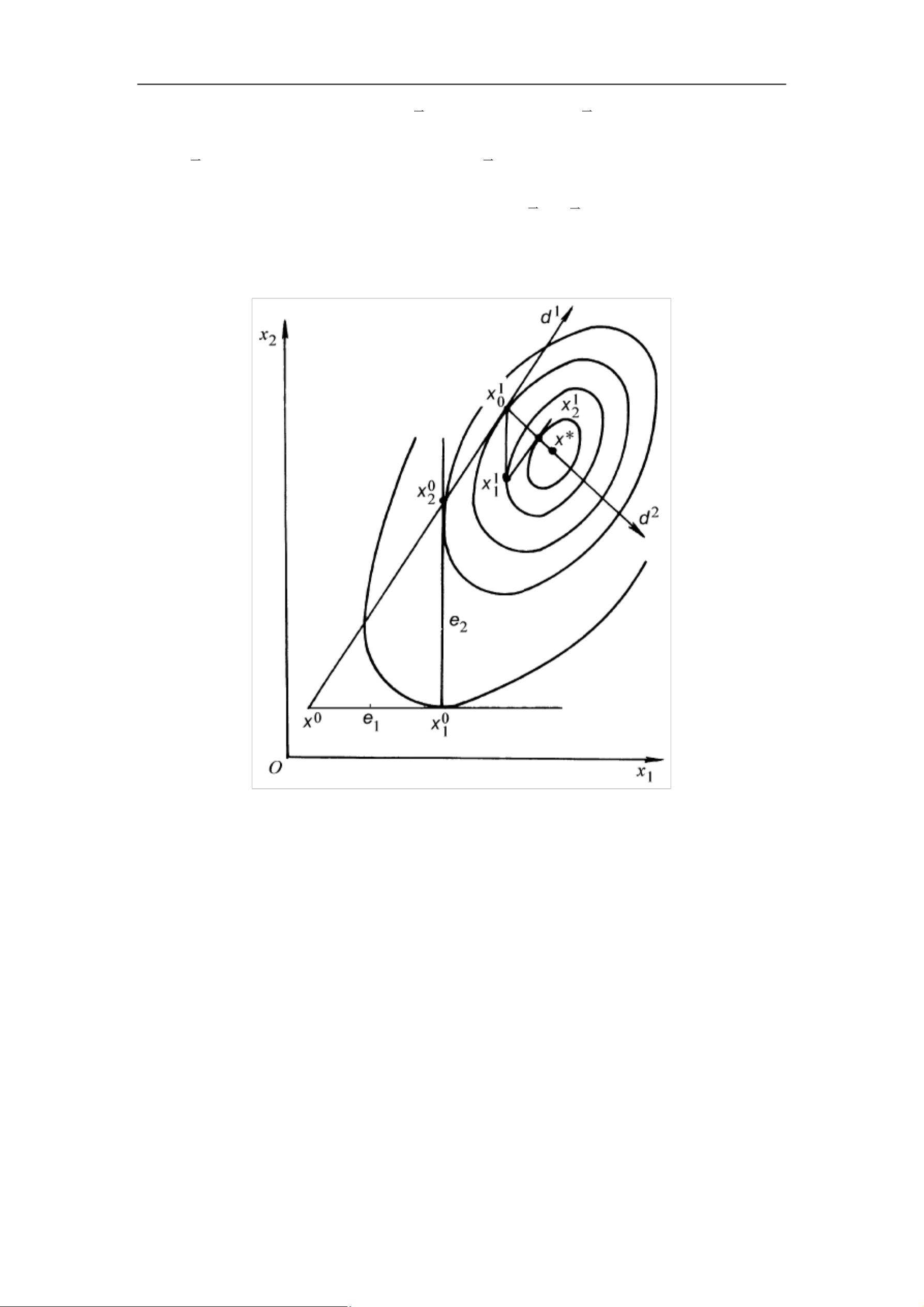
由最基本的数学基础知识可知,梯度方向是函数增加最快的方向,负梯度方
向是函数下降最快的方向,于是,利用这个下降最快方向产生了最速下降法。每
次迭代都沿着负梯度方向进行一维搜索,直到满足精度要求为止。其特点是相邻
两个搜索方向互相正交,所以很明显的一个现象就是刚开始搜索步长比较大,愈
靠近极值点其步长愈小,收敛速度愈慢,特别当二维二次目标函数的等值线是较
扁的椭圆时,迭代速度更慢。这时,倘若目标函数是等值线长、短轴都平行于坐
标轴的椭圆形,则通过坐标轮换法可以很高效的解决问题。通过两次分别沿坐标
轴进行一维搜索,便可达到极值点。但对于目标函数的等值线椭圆的长、短轴倾
斜于坐标轴时,坐标轮换法的搜索效率也显得极低。抛开这两种特殊情况,对于
一般形态的目标函数,如果在某些明显可以直达最优点的情况下(一般为靠近极
1
剩余12页未读,继续阅读






评论0
最新资源