
设计实践案例一
割草机器人的开发实践
——机器人技术的产品化
什么是机器人
大部分文学与影视电影中所出现的机器人形象都是一幅人形机器的样子,满是电路的脑袋,齿轮驱动的四肢。机器人应该按照
这样预期来设计么?现有工业技术条件下,人形拟态机器人的技术已经获得了很大的突破和进展,相信大家还记得春晚上表演
过的 HONDA 的 ASIMO 的高超舞技吧。上个世纪 80 年代研发的直立行走平台至今有 20 余年了,综合了传感器技术、计算机嵌入
式系统等等的技术突破,人形拟态机器人日趋成熟。
但是,面对市场需求和实际应用,机器人的产品形式是不应该只有这一种的,因为机器人作为一种智能产品所承担的首要的产
品功能是将人们从枯燥繁重和危险的工作中解脱出来。而人形拟态机器人所模拟的人体结构并不是一个非常适合许多繁复和危
险工作的设计,不管怎样,同等条件下,双腿还是跑不过轮子。
对于这些繁重而危险的工作,我们已经设计过很多工具来帮我们对付它们了,我们之前的设计者们花费了很多精力找到了适合
某一工作的设计方案。那么这些设计方案就是机器人产品的雏形。相反,对于市场而言,综合了众多技术突破的,耗资巨大的
人形拟态机器人未必是个经济合算或者实用的选择。
传统产品的自动化智能化是机器人技术进入我们寻常生活的首要途径,也正是我们机器人技术产品化的设计解决方案。
“机器人”一词起源于捷克语,意为强迫劳动力。这个词是由剧作家 Karel Capek 引入的,属于科幻文学作品中的一个概念。
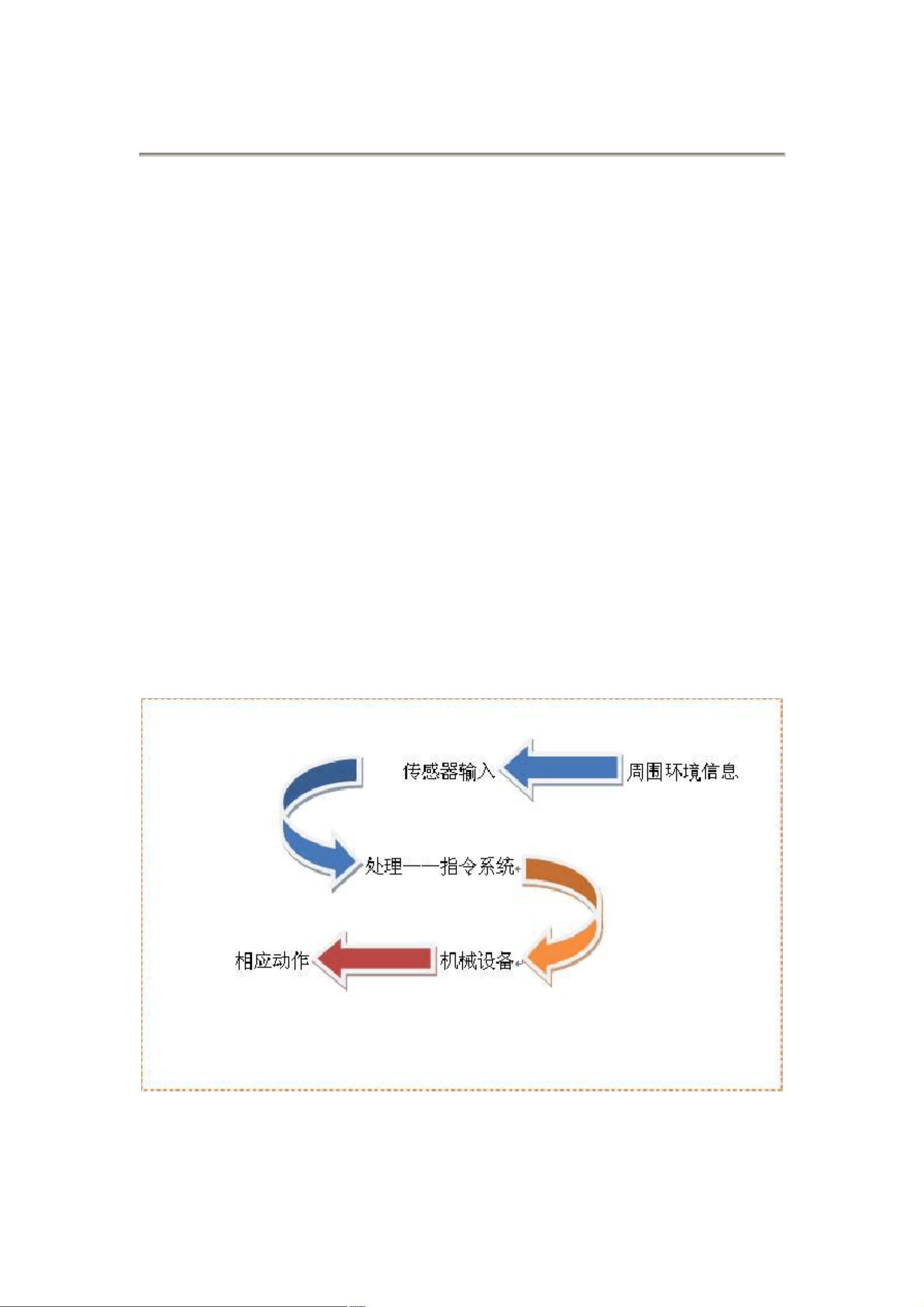
基本上,一个机器人包括:
机械设备,如可以与周围环境进行交互的车轮平台、手臂或其它构造。 设备上或周围的传感器,可以感知周围环境并向设备提
供有用的反馈。 根据设备当前的情况处理传感输入,并按照情况指示系统执行相应动作的系统。
“可重复编程的多功能操纵器,设计成通过不同的编程动作为执行多种任务的部件、工具或专门的设备。”
—— 美国机器人协会,1979 年


剩余11页未读,继续阅读
资源评论


xxpr_ybgg
- 粉丝: 6789
- 资源: 3万+









最新资源
- 基于matlab的FFT分析和滤波程序,可对数据信号进行频谱分析,分析波形中所含谐波分量,并可以对特定频率波形进行提取 不需要通过示波器观察,直接导入数据即可,快捷便利 程序带有详细注释, 图a为
- 基于Springboot+Vue的精简博客系统的设计与实现-毕业源码案例设计(源码+论文).zip
- 基于Springboot+Vue交通管理在线服务系统的开发-毕业源码案例设计(95分以上).zip
- uDDS源程序publisher
- 机械手自动排列控制PLC与触摸屏程序设计
- 基于Springboot+Vue的客户关系管理系统(crm)的设计与实现-毕业源码案例设计(高分毕业设计).zip
- 基于Springboot+Vue的课程作业管理系统毕业源码案例设计(高分毕业设计).zip
- 基于Springboot+Vue的酒店客房管理系统-毕业源码案例设计(源码+数据库).zip
- (链家)上海市房屋租赁价格数据.zip
- ESP8266-调试.pdf
- 基于STM32设计的工地扬尘与噪音实时监测系统(网页).pdf
- 基于Springboot+Vue的库存管理系统-毕业源码案例设计(高分毕业设计).zip
- 基于Springboot+Vue的老年人体检管理系统-毕业源码案例设计(高分毕业设计).zip
- 基于Springboot+Vue的乐享田园系统-毕业源码案例设计(95分以上).zip
- 基于Springboot+Vue的流浪宠物管理系统的设计与实现-毕业源码案例设计(95分以上).zip
- 基于Springboot+Vue的论坛系统-毕业源码案例设计(高分项目).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


