

Pre dictable sche duling of a single m achine
subj e ct to bre akdowns
SANJAY V. MEHTA and REHA UZSOY
Abstract. Th e pre dictive p roduction sche dule has two im -
por tant function s; allocating shop re sou rces to the differe nt
jobs to optim ize som e m easure of sh op pe rform an ce and
se rving as a basis for plan ning activities such as mate rial
pro cu rem e nt, preven tive mainte nance and de livery of orde rs
to e xternal or inte rn al cus tom ers. This sche dule is modified
durin g execution on the occ urre n ce of disrup tions such as
m achine breakdowns. Th e sche dule modification proce ss ma y
de lay or rende r in feasible the e xecution of activities plan ned
on the basis of the pre dictive sche dule . Th us it is o f interest to
de ve lop pre dicti ve sche dule s which can absorb disruptions
without affecting plann ed ac tivities while main tainin g high
shop perform ance . A pre dictable sch eduling approach is
presen te d, whe re the pre dictive sche du le is bu ilt with such
obje ctives. The effects of disruptions on planne d activities are
m easure d by the differe nce be twee n plan ne d and realized job
com pletion time s. Th e spe cific sche duling m od el considere d is
m inim izin g m axim um laten e ss ( Lmax) on a s ingle m ach i n e
with dynam ic job arrivals and random m achine bre akdown s. It
is shown that pre dictable sch eduling provide s high pre dict-
abilit y with m inor sacrifices in re alized sche dule pe rform an ce .
1. Intro d u c tio n
Tim e ly and cost e ffective production is be com in g
in cre asingly im portan t in today’ s global com pe titive
m arke ts. Prod uction sch e d ulin g plays an im portan t role
in in d u cin g such fac tor y be h avio u r by e fficie n tly
allocatin g scarce re sources to com pe ting activitie s over
tim e . Effe ctive production sch e dulin g proce du re s are
particularly im p ortan t in th e large , com ple x m an ufac-
turin g system s e ncou n te re d in high -techn ology indus-
trie s such as se m icon du ctor m an ufacturin g, wh e re
sim ple m an ual tech n ique s are u nlike ly to yie ld good
re sults ( Uzsoy et al. 199 2, 1994) .
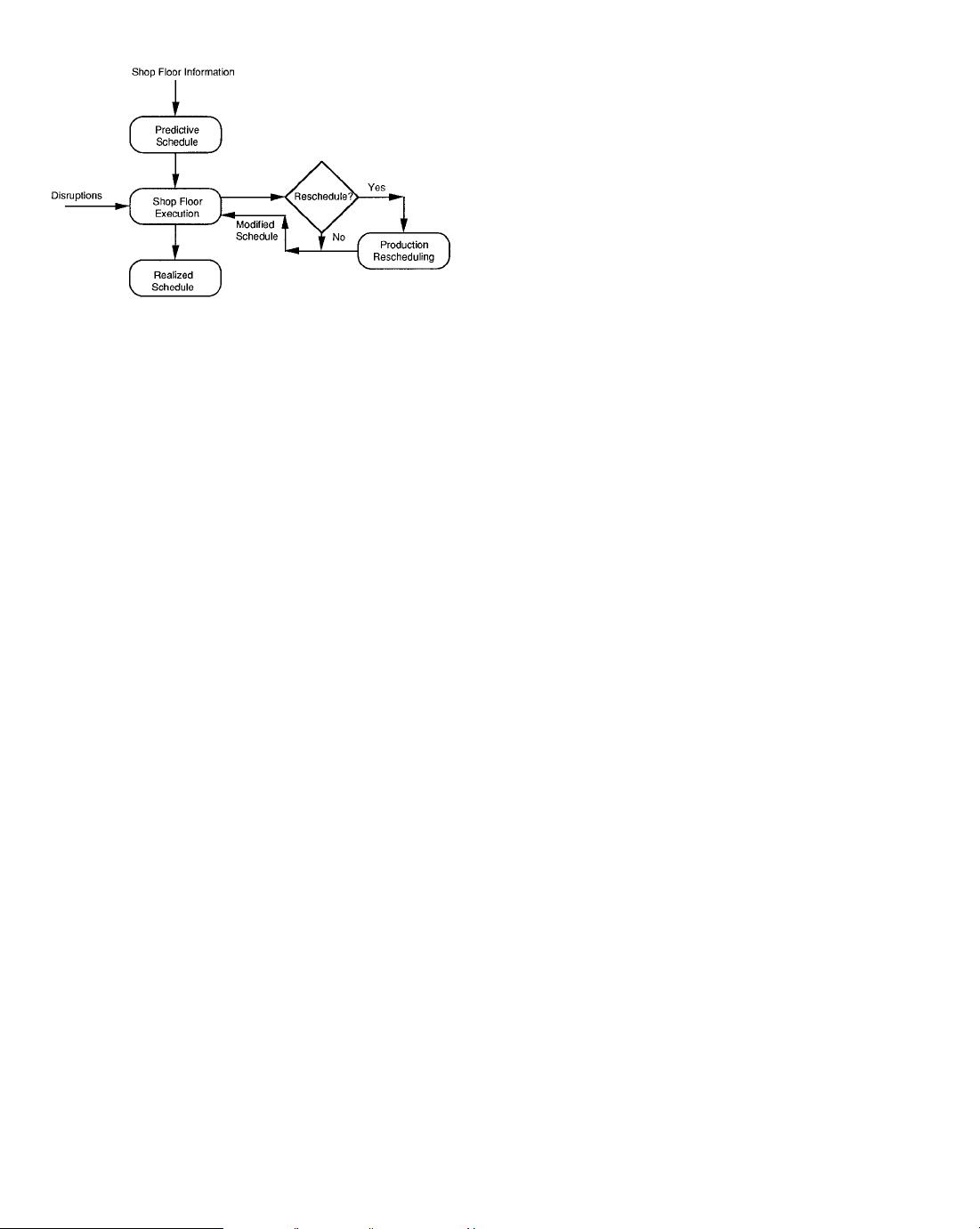
In m an y production syste m s th e sche dulin g process
is as follows. A pre dictive sch edule S
p
is de velop e d for a
ce rtain pe riod of time in t o the future , such as a day or a
sh ift, b ase d on th e state of th e sh o p floor an d
in form ation on cu rre n t ord e rs. Th e sc h e d u le is
re le ase d to the shop floor at th e start of the pe riod.
Wh en unforese e n di sruption s such as m ach in e bre ak-
down s occu r on the sh op floor, S
p
is m odifie d to
m ain ta in fe asibility or im prove perform an ce . We shall
refe r to th e ac tivity of sc h e d u le m odificatio n as
re sch e du lin g. At the en d of the plan n in g h orizon , we
h ave the re alize d sch e dule S
r
th at was actually e xe cute d
on th e sh op floor, which m ay d iffe r substan tially from S
p
du e to re sch edulin g. Figu re 1 sh ows th is proce ss, wh ich
we shall refe r to as Predictive
/
Reactive Sche du lin g.
Th e pre dictive sch e dule S
p
se rves two im portan t
fun cti on s. Th e first is to allocate shop resou rces to the
d iffe re n t jobs to optim ize som e m e asure of sh op
pe rform an ce. Th e se cond , as poin te d out by Wu et al.
( 1993 b) , is to se rve as a basis for plan n i n g activities such
as m ate rial procure m e n t, pre ve n tive m ain te nan ce an d
de live ry of orde rs to e xtern a l or in te rnal custom e rs.
Resch e d ulin g on th e shop floor aim e d at im proving
sh op pe rform an ce m ay delay or re nd e r infe asible th e
e xe cution of th e se activit ie s as plan n e d. Fre que n t
re sch e du lin g can al so m ake sh op be haviour h ard to
p re dict, reduc in g th e e ffe ctive n e ss of h igh e r le ve l
production plan n in g system s. Th us it is of in te re st to
d e ve lop p red ictive sch e d u le s wh ich m in im ize th e
e ffe cts of d isrup tion s on plan n e d ac tivitie s wh ile
m ain ta in in g high sh op pe rform an ce . We shall re fer to
sch e d ulin g with such dual objective s as Predictable
Schedu lin g ( PS) . In th is p aper we an alyse a predictable
sch e dulin g proble m an d de ve lop solution te chnique s.
Unde rstan din g th e nature a n d fre que n cy of th e
disruption s e n countered on th e shop floor is e sse n tial
to e ffe ctive schedu lin g in the face of un ce rtain ty. McKay
et al. ( 1989) ide ntify three type s of un ce rtaintie s in
m an ufac turin g e n viron m e n ts; com ple te un known s,
suspicion s abou t th e future a n d known unce rtain tie s.
Comple te un kn own s are tota lly unpredictable e ven ts
such as a sudde n strike about which n o advan ce
INT. J. CO MPUTER INTEGRATED MANUFACTURING
, 1999,
VOL
. 12,
NO
. 1, 15 ± 38
0951-192 X
/
99 $12.00
Ó
1999 Taylor & Francis Ltd
Authors: S.V. Me hta, R. Uzsoy, Sc h ool of Indu strial En gin e e rin g, 1287 Grissom
Hall, Purdue Unive rsity, We st Lafaye tte , Indian a 47907-12 87, USA.

剩余23页未读,继续阅读
资源评论


xuexishiwobiantai
- 粉丝: 0
- 资源: 1









最新资源
- 每周三白嫖古茗?进来看!内含百发百中教程!.mp4
- 美团2024年查看年度消费报告.mp4
- 入校申报审批-JAVA-基于springBoot入校申报审批系统的设计与实现(毕业论文)
- 美团领10亓网吧和台球团购券.mp4
- 免费PDF转换和编辑工具 PDFgear v2.1.10.mp4
- 免费领取咪咕NBA联盟通7天会员.mp4
- 免费的音乐播放器,支持本地和网络歌曲播放.mp4
- 免费录屏直播工具OBS Studio v31.0.0官方版.mp4
- 免费领取咪咕NBA联盟通7天会员活动.mp4
- 计算机学院校友网-JAVA-基于springBoot计算机学院校友网设计与实现(毕业论文)
- 免费网络验证一键加密.mp4
- 模拟来电 1.0 自定义设置来电电话.mp4
- 某宝100大洋的Java架构-黑马-Java架构师实战训练营(第4期).mp4
- 魔力自动点击器 1.4.24 自动点击器.mp4
- 内存清理工具 ReduceMemory v1.7排除线程.mp4
- 拿捏GPT,无需付费,终身Pro会员!.mp4
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


