广州周立功单片机发展有限公司 Tel:(020)38730976 38730977 Fax:38730925 http://www.zlgmcu.com
第1章 通用异步收发器(UART)
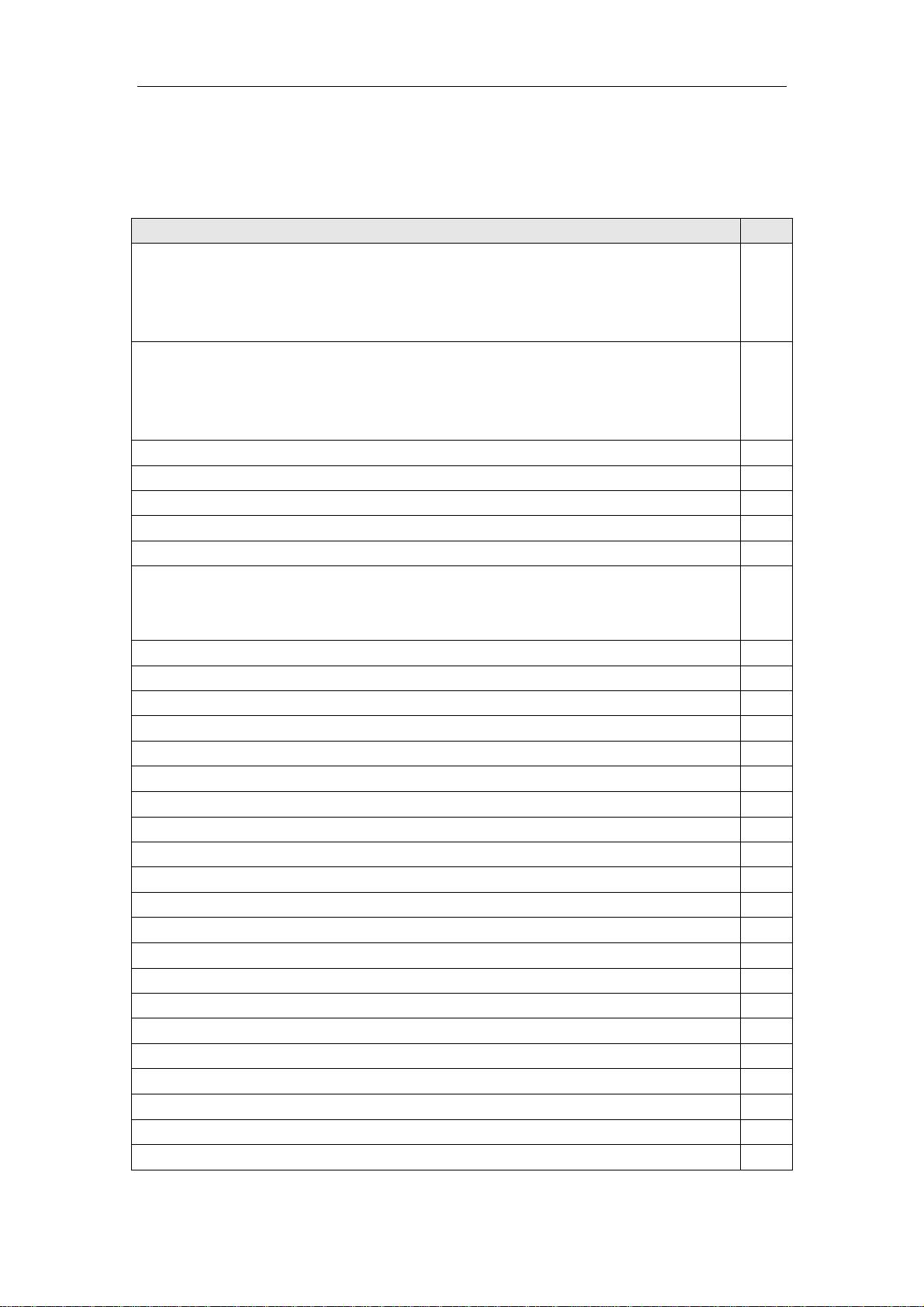
表 1.1 UART 库函数索引
函 数 原 型 页码
void UARTConfigSetExpClk(unsigned long ulBase,
unsigned long ulUARTClk,
unsigned long ulBaud,
unsigned long ulConfig)
7
void UARTConfigGetExpClk(unsigned long ulBase,
unsigned long ulUARTClk,
unsigned long *pulBaud,
unsigned long *pulConfig)
8
#define UARTConfigSet(a, b, c) UARTConfigSetExpClk(a, SysCtlClockGet( ), b, c) 8
#define UARTConfigGet(a, b, c) UARTConfigGetExpClk(a, SysCtlClockGet( ), b, c) 8
void UARTParityModeSet(unsigned long ulBase, unsigned long ulParity) 9
unsigned long UARTParityModeGet(unsigned long ulBase) 9
void UARTFIFOLevelSet(unsigned long ulBase, unsigned long ulTxLevel, unsigned long ulRxLevel) 9
void UARTFIFOLevelGet(unsigned long ulBase,
unsigned long *pulTxLevel,
unsigned long *pulRxLevel)
10
void UARTEnable(unsigned long ulBase) 10
void UARTDisable(unsigned long ulBase) 10
void UARTEnableSIR(unsigned long ulBase, tBoolean bLowPower) 11
void UARTDisableSIR(unsigned long ulBase) 11
void UARTDMAEnable(unsigned long ulBase, unsigned long ulDMAFlags) 11
void UARTDMADisable(unsigned long ulBase, unsigned long ulDMAFlags) 11
void UARTCharPut(unsigned long ulBase, unsigned char ucData) 12
long UARTCharGet(unsigned long ulBase) 12
tBoolean UARTSpaceAvail(unsigned long ulBase) 12
tBoolean UARTCharsAvail(unsigned long ulBase) 12
tBoolean UARTCharPutNonBlocking(unsigned long ulBase, unsigned char ucData) 12
long UARTCharGetNonBlocking(unsigned long ulBase) 13
#define UARTCharNonBlockingPut(a, b) UARTCharPutNonBlocking(a, b) 13
#define UARTCharNonBlockingGet(a) UARTCharGetNonBlocking(a) 13
tBoolean UARTBusy(unsigned long ulBase) 13
void UARTBreakCtl(unsigned long ulBase, tBoolean bBreakState) 14
void UARTIntEnable(unsigned long ulBase, unsigned long ulIntFlags) 14
void UARTIntDisable(unsigned long ulBase, unsigned long ulIntFlags) 15
void UARTIntClear(unsigned long ulBase, unsigned long ulIntFlags) 15
unsigned long UARTIntStatus(unsigned long ulBase, tBoolean bMasked) 15
void UARTIntRegister(unsigned long ulBase, void(*pfnHandler)(void)) 15
1


















