技术文档 _ 二次规划(QP)样条路径.pdf
需积分: 10 5 浏览量
2022-04-17
17:09:37
上传
评论
收藏 1.65MB PDF 举报


技术文档 | 二次规划(QP)样条路径
Apollo的Planning分为参考线平滑、决策、路径规划、速度规划等部分。
从整体上来说,规划模块的架构分为两个部分 : 一部分负责对 数 据的监听、获 取 和预处理;另
一部分负责管理各个 优 化 模块。数据进入后, 对 其 综合处理为规划模块 的 内部数据结构,由任
务管理器调度合适的 优 化 器进行各个优化任务 。 综 合优化的结果,经过 最 终的验证后,输出给
控制模块。
在设计上,实现了策略的可插拔,使得各个优化器可以灵活配置不同策略,提升迭代效率。
EM-Planner是具体的规划实施类,它基于高精地图、导航路径及障碍物信息作出
实际的驾驶决策,包括路径、速度等方面。
首先使用DP(动态规划)方法确定初始的路径和速度,再利用QP(二次规划)方
法进一步优化路径和速度,以得到一条更平滑的轨迹,既满足舒适性,又方便车辆
操纵。
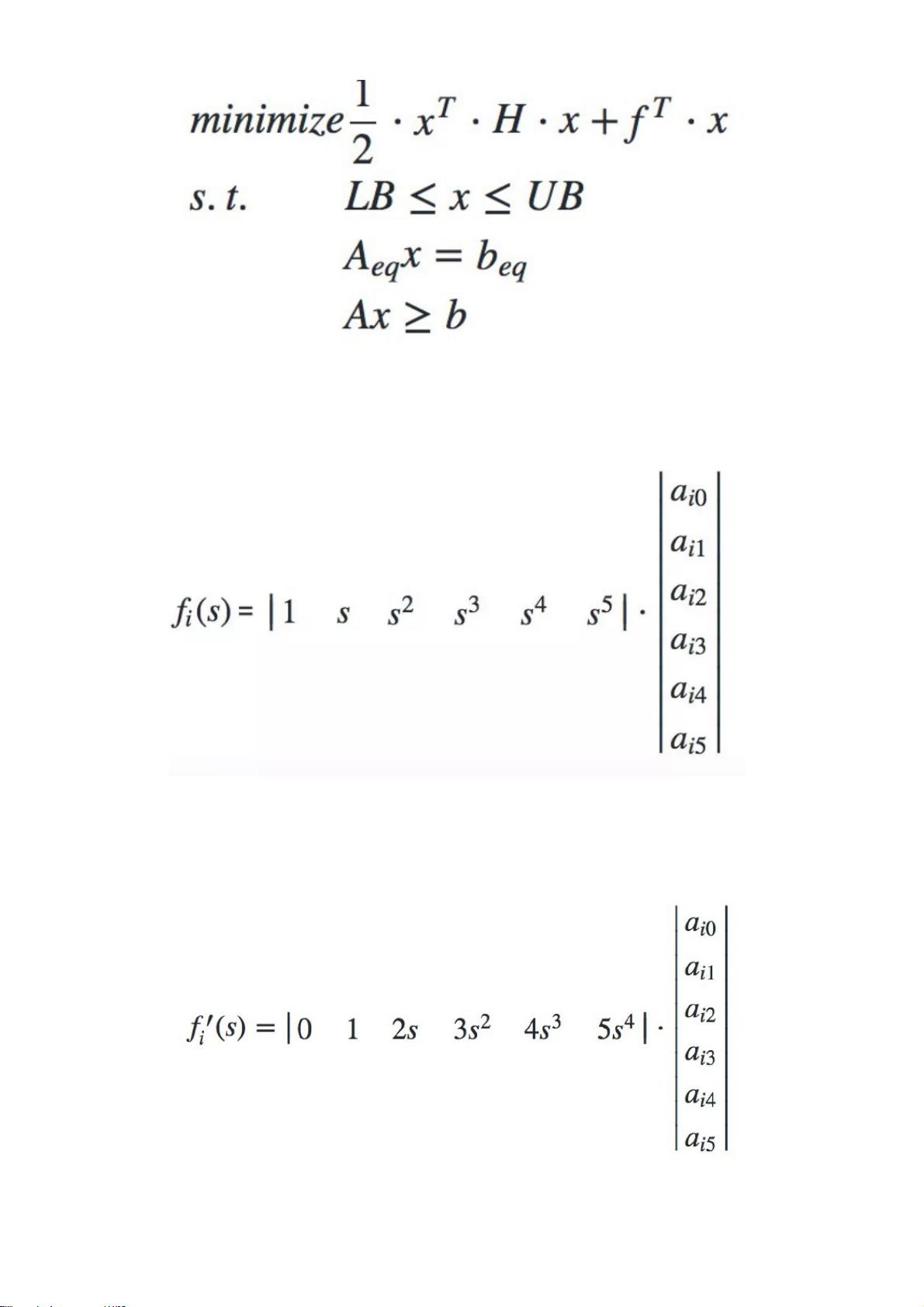
基于样条的车辆轨迹优化二次规划,为了寻求更优质更平滑,体感更好的路径,需
要使用二次规划的方法寻找。需要的限制条件有:曲率和曲率连续性、贴近中心
线、避免碰撞。
今天,就让阿波君和开发者们一起了解二次规划样条路径是如何实现的。
以下,ENJOY:

剩余12页未读,继续阅读













评论0