
1
3.5 两相混合式步进电机
及其驱动技术
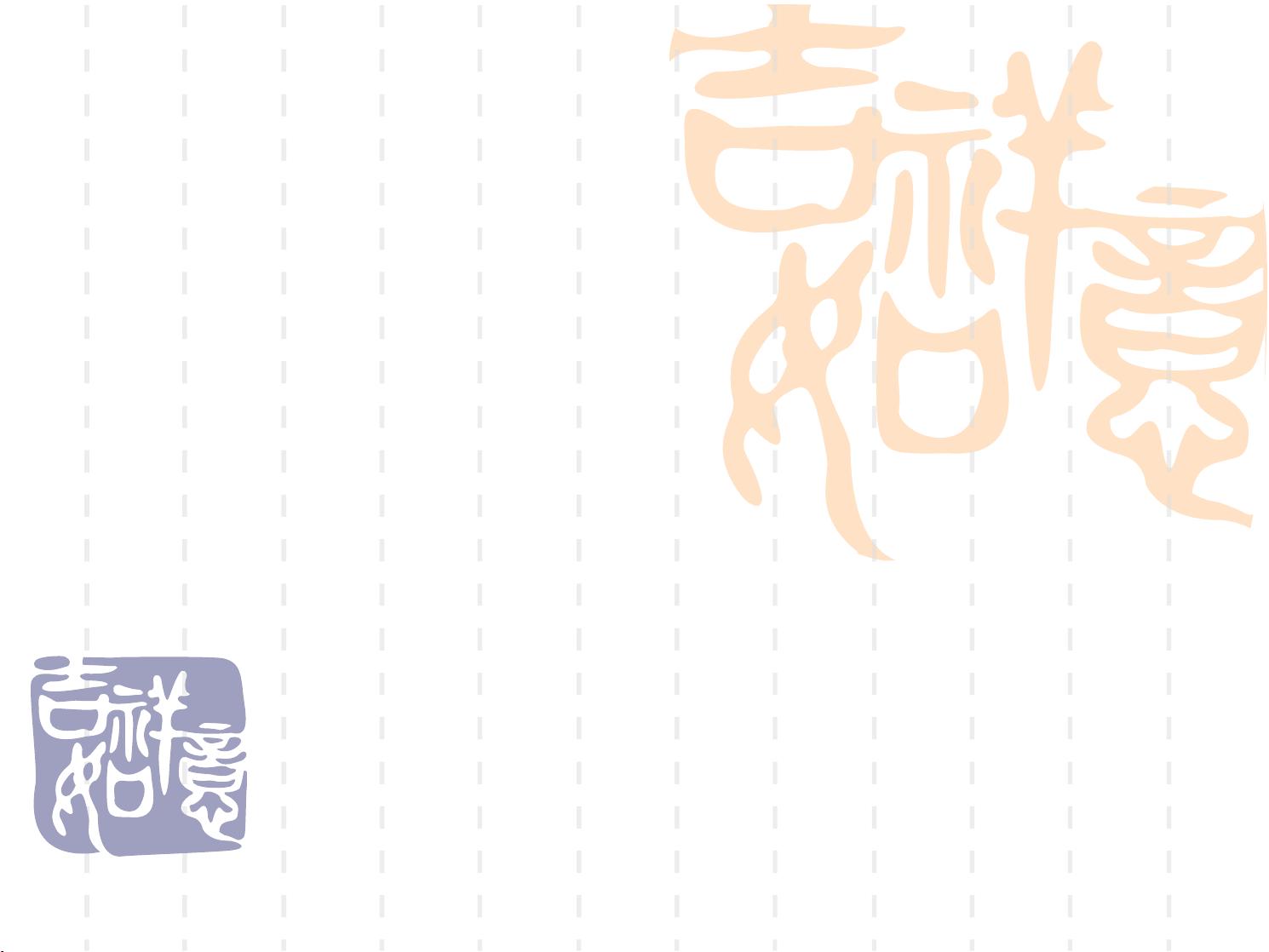
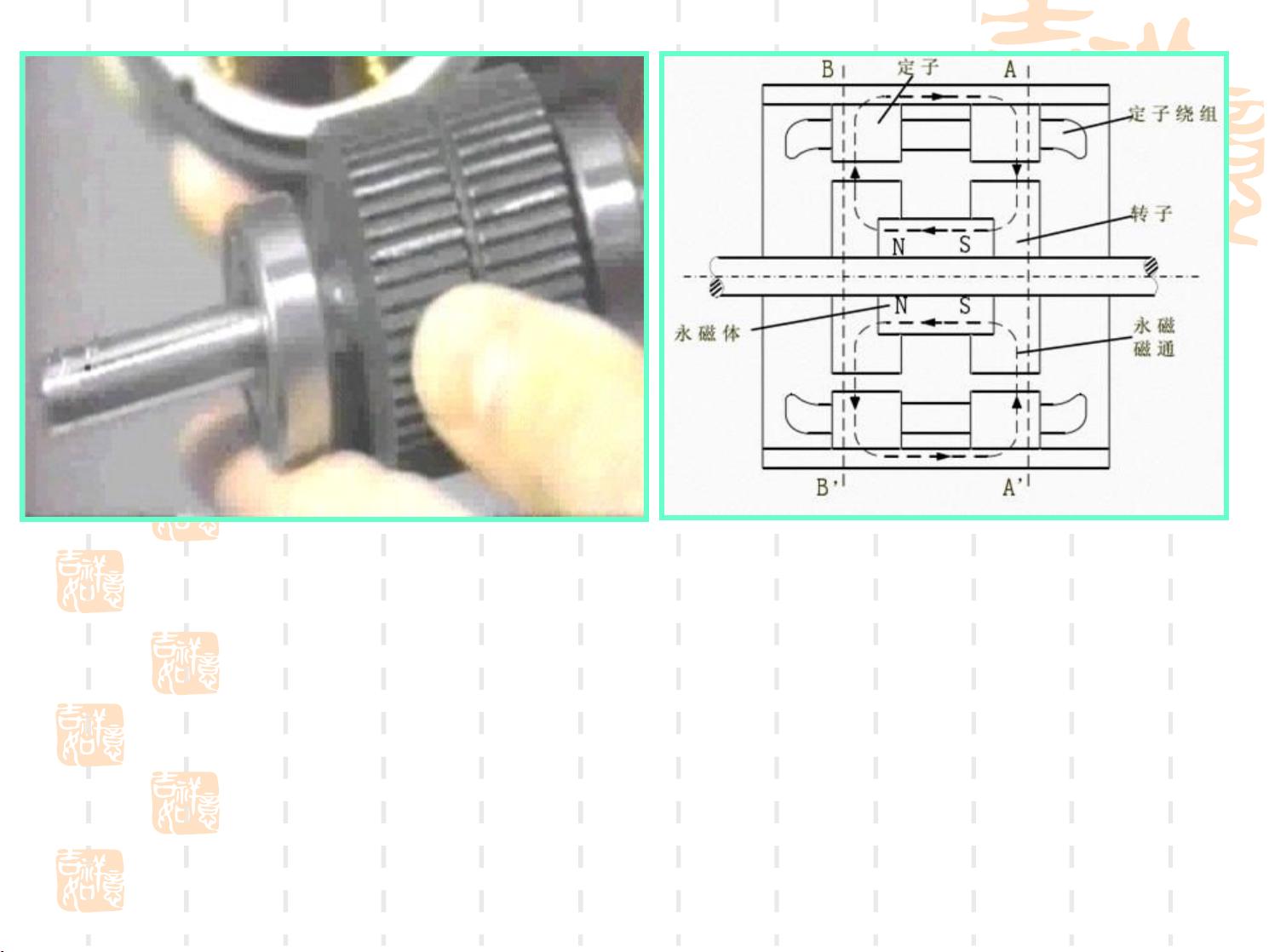
1. 两相混合式步进电机结构
2. 两相混合式步进电机工作原理
3. 两相混合式步进电机驱动技术
4. 两相混合式步进电机的主要特性和技术指标
第一页,编辑于星期六:十四点 四十二分。



剩余51页未读,继续阅读

xiaowu198809
- 粉丝: 13
- 资源: 17万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论2