ABB Robotstudio 仿真软件是一款强大的工业机器人仿真工具,主要用于设计、测试和优化机器人系统的作业流程。本使用说明将详细介绍如何通过项目式操作进行焊接机器人和搬运机器人的设置。
### 项目一:焊接机器人
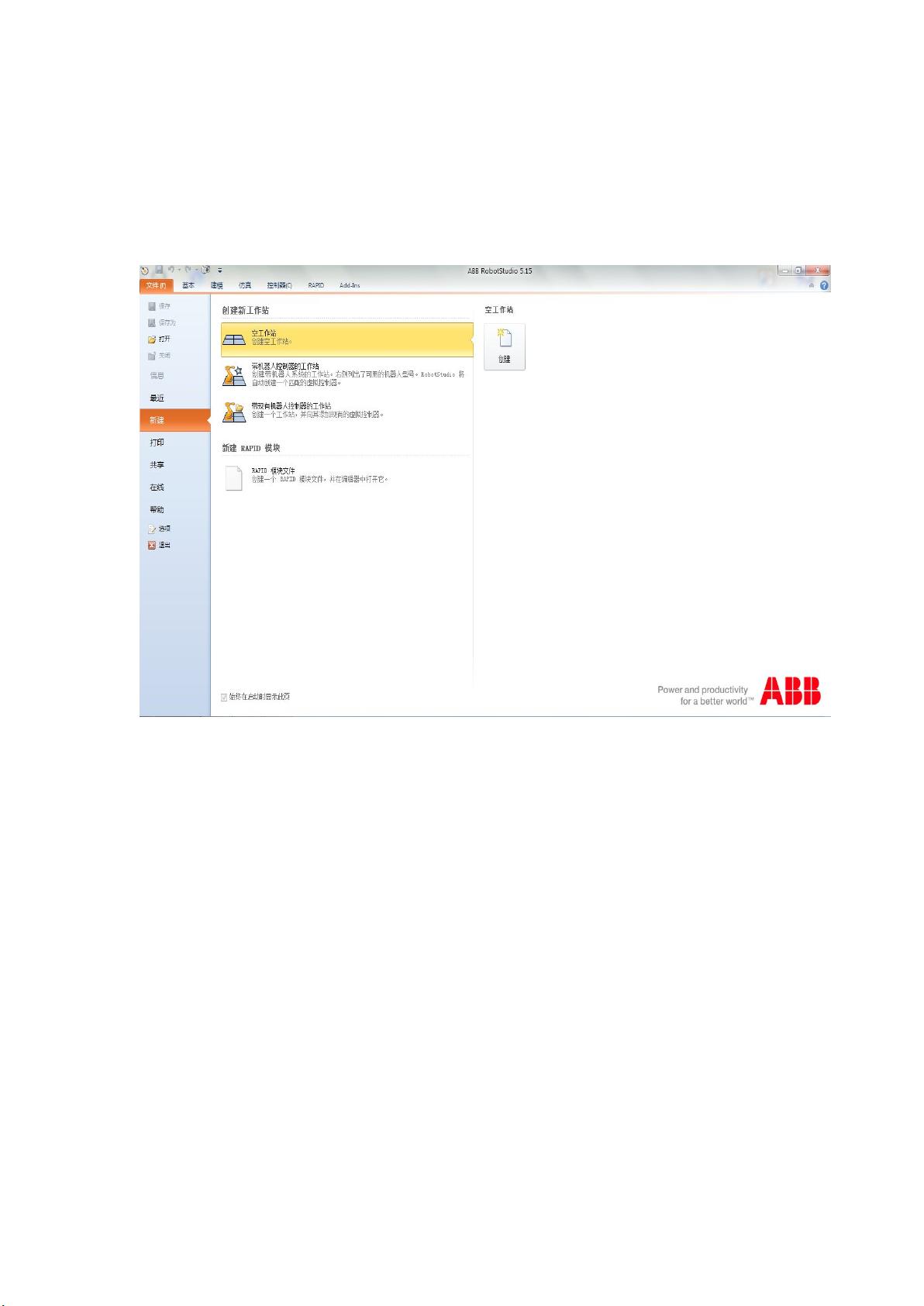
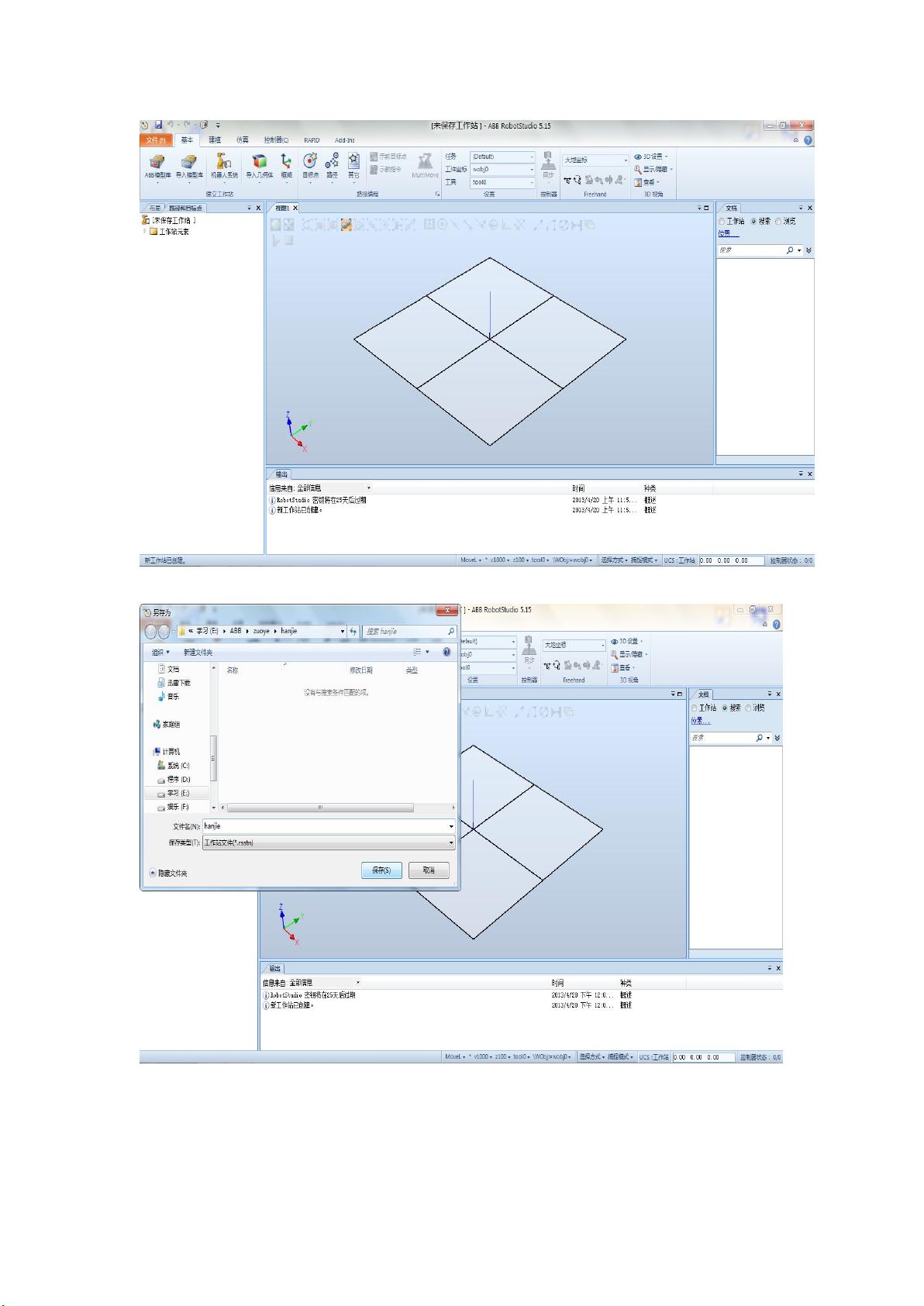
1. **创建工作站**:首先打开 Robotstudio 软件,点击“创建”->“新建空工作站”,并保存工作进度,确保数据的安全。
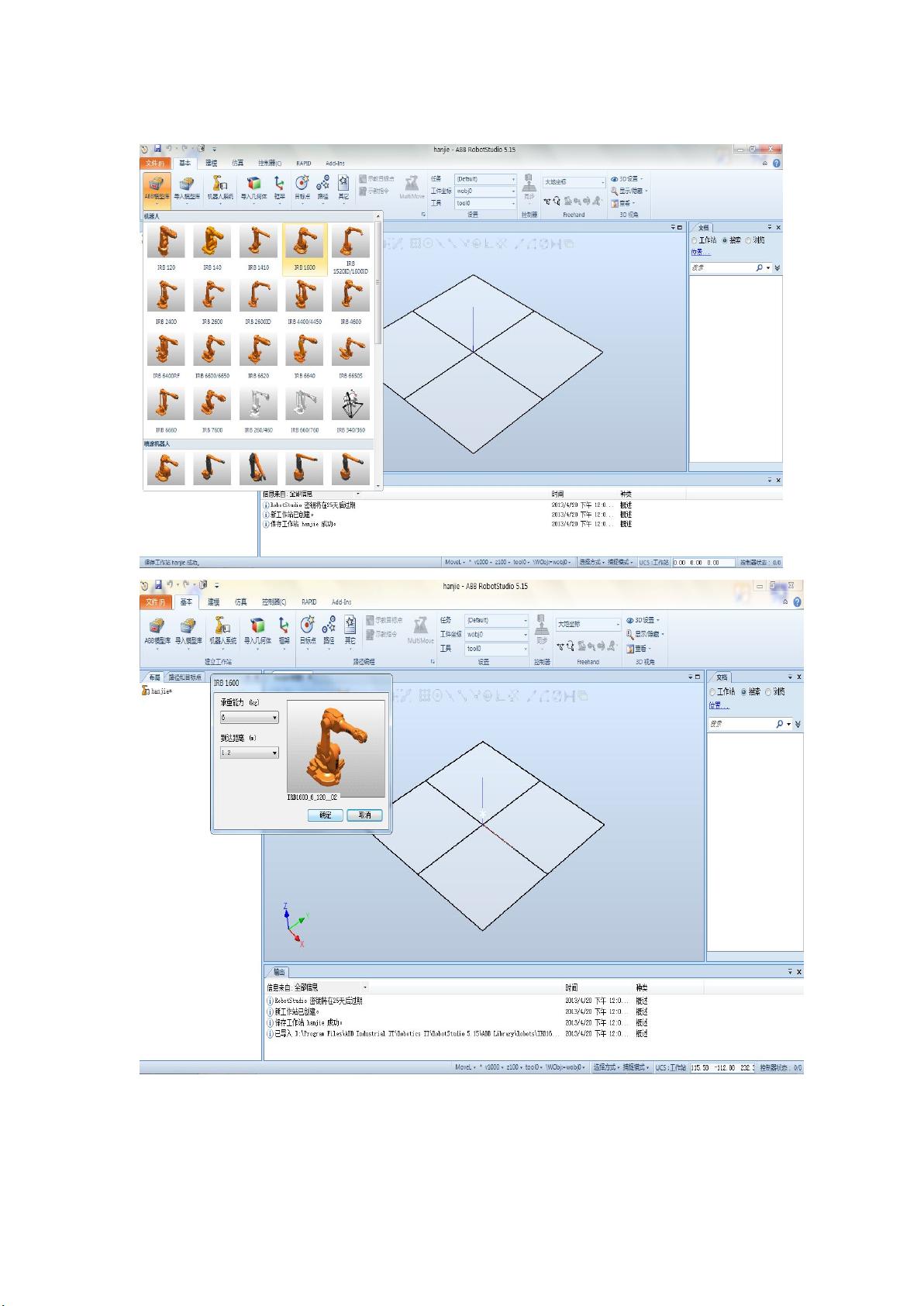
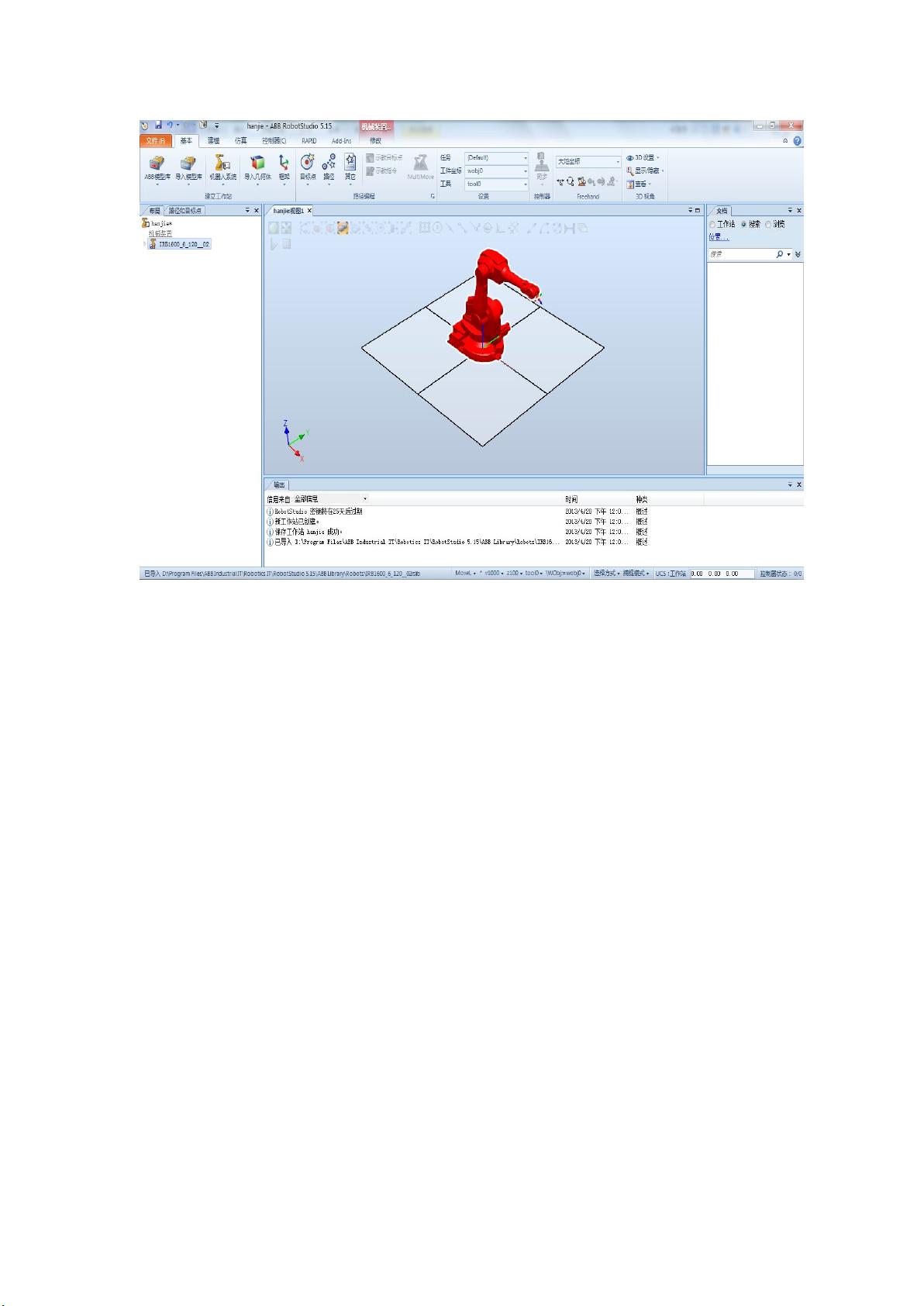
2. **选择机器人模型**:在工作台中选择 ABB 机器人模型 IRB1600,根据实际需求选择合适的承重能力和到达距离。
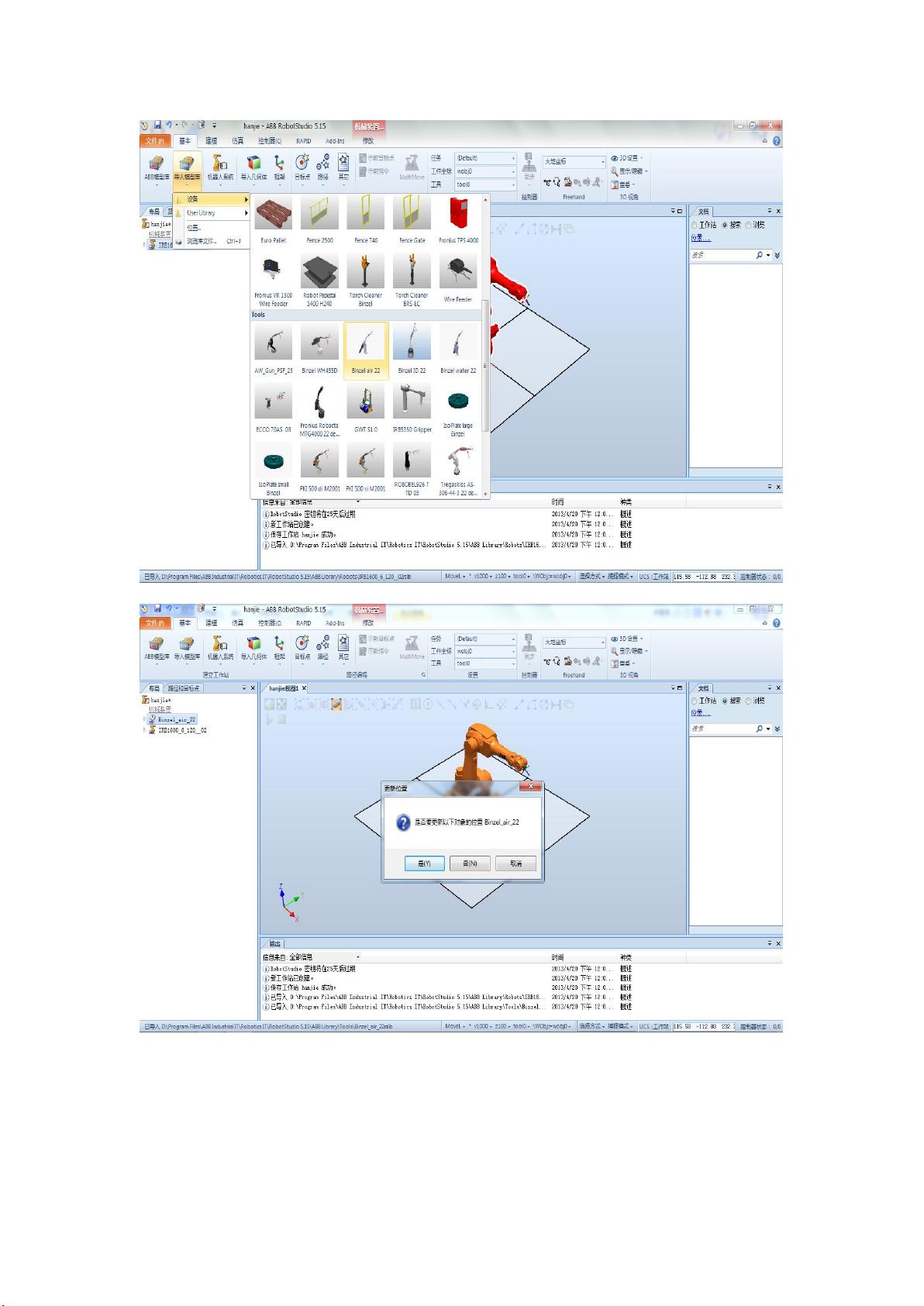
3. **添加附件**:导入焊接设备 Binzel air 22,并将其安装在机器人法兰盘上,便于机器人执行焊接任务。
4. **创建工件**:利用“建模”->“固体”->“矩形体”功能,设置合适的长宽高参数,创建代表工件的矩形实体。
5. **创建机器人系统**:选择“基本”->“机器人系统”->“从布局创建系统”,按提示完成系统配置。
6. **创建路径**:在控制器启动后,选择“路径”->“创建一个空路径”,并修改参数如 moveJ, V1000, Z100,定义机器人的关节运动速度和姿态。
7. **示教路径**:激活路径,通过“示教指令”手动示教机器人,捕捉矩形体的四个角点,形成完整的路径。
8. **同步到 VC**:选择“基本”->“同步到 VC”,将路径同步到虚拟控制器,然后在“仿真”->“仿真设定”中将路径添加到主队列,应用并确认设置。
9. **仿真运行**:启用“仿真录像”功能,点击播放开始仿真运行,观察机器人按照预设路径执行焊接任务。
### 项目二:搬运机器人
1. **新建工作站**:与焊接机器人类似,新建一个空工作站,导入 IRB4600 机器人模型,并根据负载需求选择合适的承载能力。
2. **创建工件**:使用“建模”->“固体”->“圆柱体”创建两个不同高度的圆柱体,一个作为工具添加到法兰盘,另外两个代表待搬运的物品。
3. **设定颜色**:为方便区分,可以右击物体或在布局窗口中调整物体的颜色。
4. **建立机器人系统**:参照项目一的方法,根据布局创建机器人系统,包括配置编辑器中的 I/O 设置。
5. **新建 I/O 单元**:在配置编辑器中新建 Unit,并创建信号 do1 和 do2,用于控制机器人的搬运动作。
这两个项目展示了 Robotstudio 在模拟焊接和搬运任务时的基本步骤,包括机器人选择、工件建模、路径规划、系统配置和仿真运行。通过这样的过程,用户可以在实际操作前验证和优化机器人的工作流程,提高生产效率和安全性。