基于嵌入式Linux系统设计的倒车雷达预警系统。 支持激光测距功能,支持设置报警范围距离,蜂鸣器根据距
离不同进行调整声音的频率,LCD显示屏实时显示倒车影像画面。
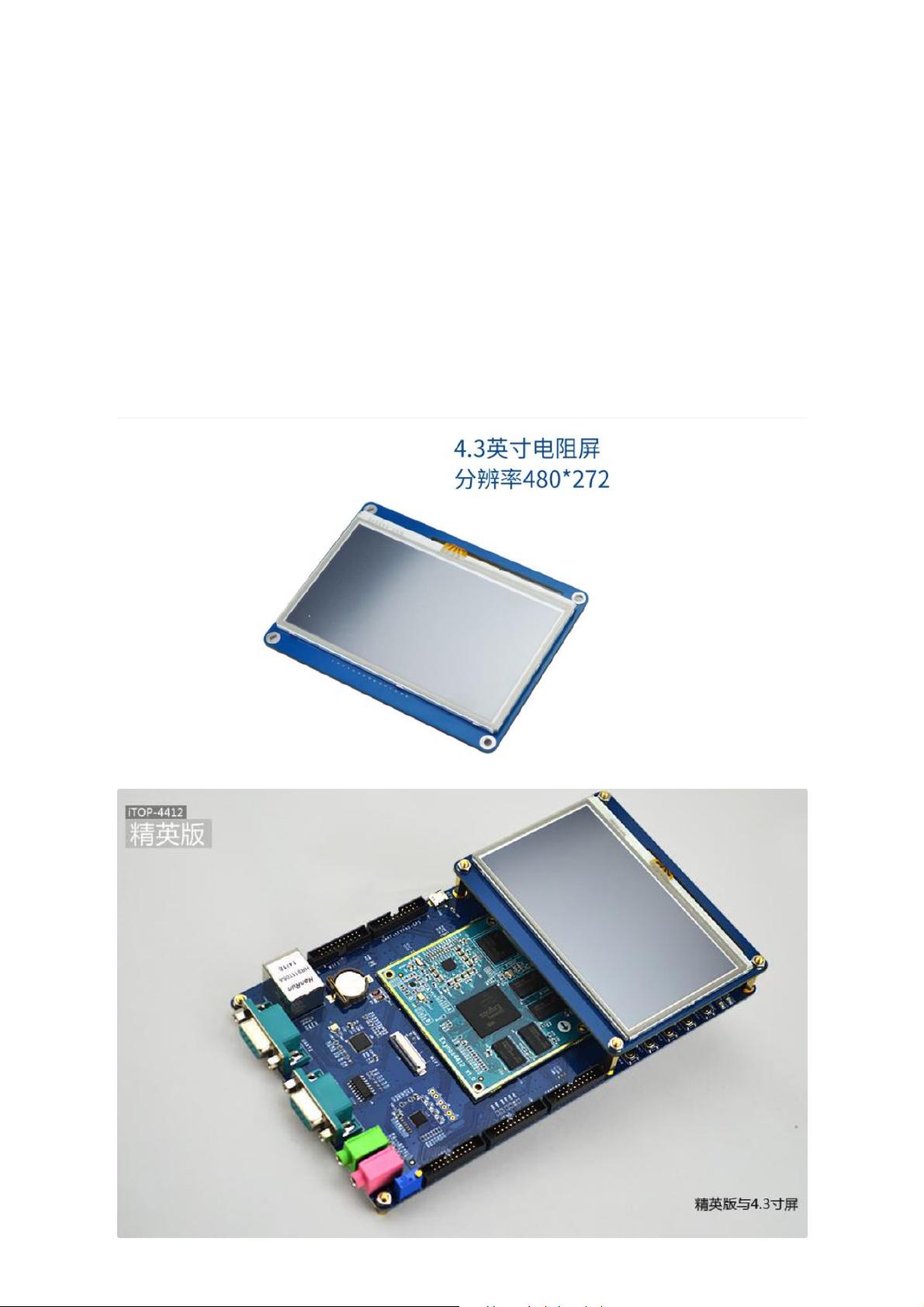
主控开发板采用ITOP-4412精英版,运行的Linux系统版本为3.0。
屏幕采用4.3寸LCD屏,分辨率为480*272, LCD的设备节点是/dev/fb0,是标准的帧缓冲框架进行开发。
摄像头采用UVC免驱摄像头,通过标准V4L2框架读取数据进行显示。
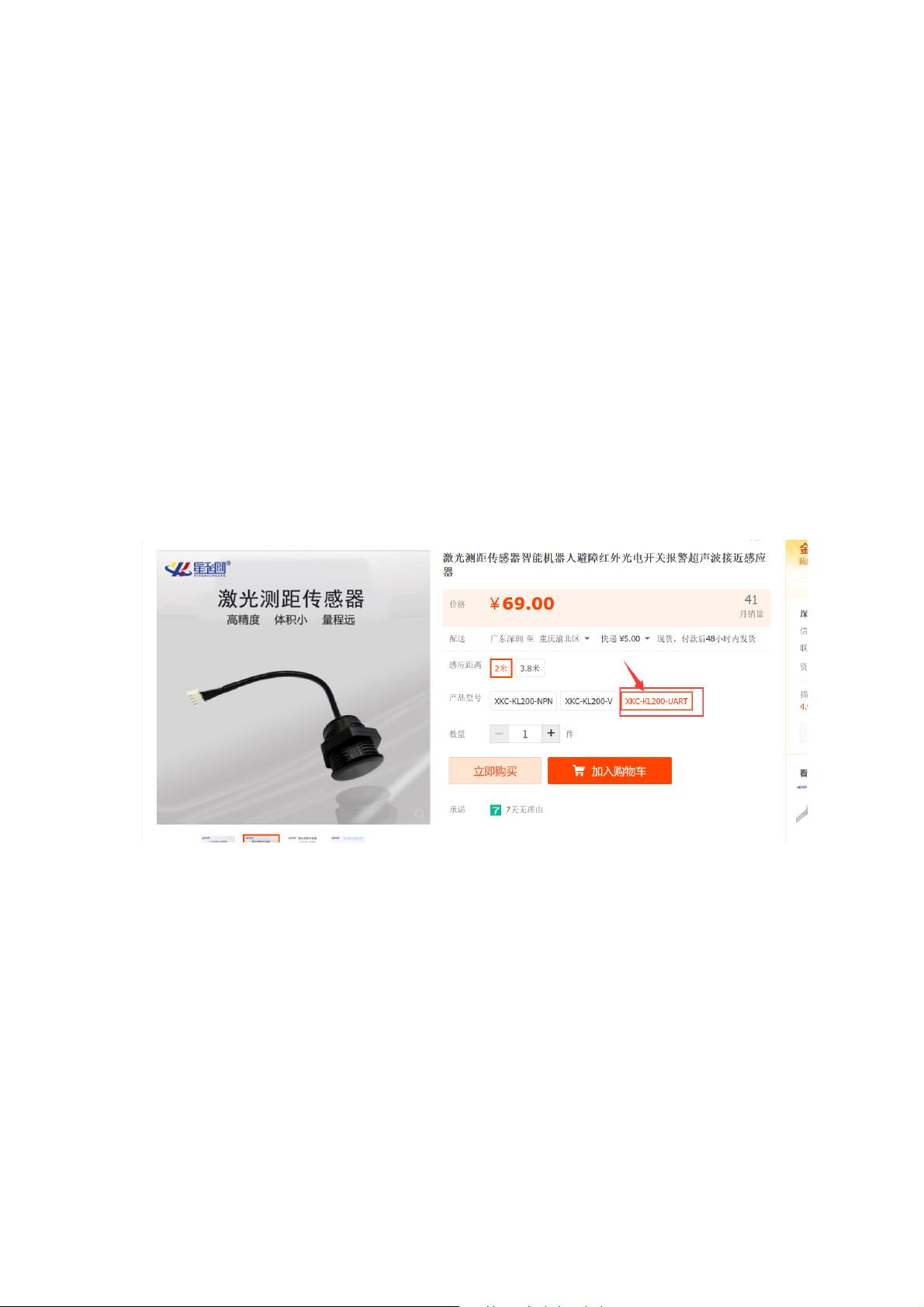
测距模块采用高精度激光测距模块,利用串口返回测量的距离,代码里采用表示标准串口协议通信。
蜂鸣器采用有源蜂鸣器,可以利用GPIO口输出高低电平的间隔模拟PWM,根据距离的长短设置报警的频率。
一、前言
随着汽车成为日常生活中不可或缺的交通工具,如何确保驾驶过程的安全性和便利性成为了重要议题。倒车是在
驾驶过程中常见的操作,但由于视野受限等因素,倒车时常常容易发生碰撞或刮擦事故。为了减少这类事故的发
生,提高驾驶员的倒车安全性和效率,就需要一套倒车雷达预警系统。
传统的倒车雷达系统主要依赖声音提示驾驶员,但在复杂的环境中,声音提示可能不够直观和准确。当前基于嵌
入式Linux系统设计了一款倒车雷达预警系统,通过引入激光测距功能、蜂鸣器报警和LCD实时显示倒车影像等
技术,提供更全面、直观的信息给驾驶员。
该系统集成了激光测距、蜂鸣器报警和LCD实时显示倒车影像等多项功能,为驾驶员提供更为便捷、安全的倒车
体验。
(1)激光测距功能:
系统采用了高精度激光测距模块,能够实时、准确地测量车辆与障碍物的距离。
测距模块通过串口与主控开发板通信,返回测量的距离数据。
用户可根据需要设定报警范围距离,当车辆与障碍物距离小于设定值时,系统会触发报警机制。
(2)蜂鸣器报警功能:
系统采用了有源蜂鸣器,可以通过GPIO口输出高低电平的间隔来模拟PWM信号。
根据车辆与障碍物的距离,蜂鸣器的声音频率会进行相应调整,以提醒驾驶员注意距离变化。
距离越近,蜂鸣器声音频率越高,报警越急促,以确保驾驶员能够及时作出反应。
(3)LCD实时显示倒车影像功能:
系统采用了4.3寸LCD屏幕,分辨率为480*272,通过标准的帧缓冲框架进行开发。
摄像头采用了UVC免驱摄像头,通过标准的V4L2框架读取数据进行显示。
驾驶员在倒车过程中,可以实时在LCD屏幕上看到车辆后方的影像,以便更好地掌握车辆周围情况。
(4)用户设置功能:
用户可以根据需要设定报警范围距离,以适应不同的驾驶环境和驾驶习惯。
系统设置界面友好,操作简便,用户可以轻松完成相关设置。
(5)系统稳定性与可靠性:
主控开发板采用ITOP-4412精英版,运行的Linux系统版本为3.0,确保系统稳定、高效地运行。
系统对硬件进行了优化配置和调试,确保各项功能在实际使用中能够稳定、可靠地工作。
这款基于嵌入式Linux系统的倒车雷达预警系统集成了激光测距、蜂鸣器报警和LCD实时显示倒车影像等多项实
用功能,能够为驾驶员提供更为便捷、安全的倒车体验。
参考文献: