
(1)我的CSDN博客主页: https://blog.csdn.net/xiaolong1126626497
1. 前言
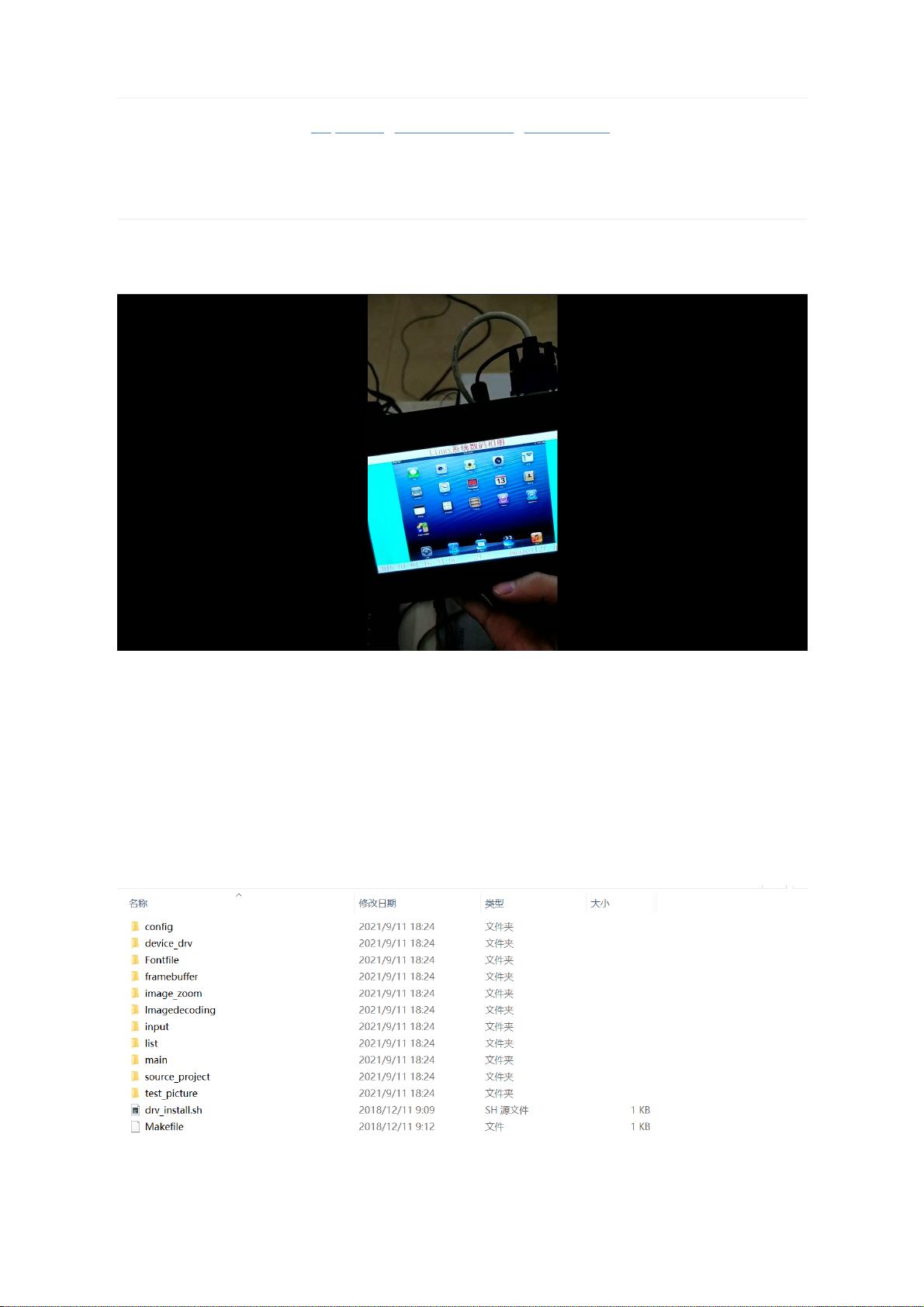
这是基于Linux系统开发板设计一个小项目-数码相册,在LCD屏上可以显示完成常见的图片显示,翻
页、旋转、缩放等功能。
开发板采用友善之臂的Tiny4412开发板,CPU是三星的4412,最高主频1.5GHZ。板子配有8G的
EMMC,2G的DDR,运行Linux3.5内核,文件系统采用busybox制作的最小根文件系统,不带图形桌面
框架,系统是最小最精简的系统。
要完成整个项目相册的功能,需要的东西还是比较多的,首先要编译安装各种图片库: libjpg,giflib,
libpng等等,图片需要缩放,需要支持缩放算法;LCD界面上的文字,时间采用矢量字体显示的,还需
要交叉编译安装freetype库。然后硬件层,需要编写LCD屏驱动(帧缓冲框架),触摸屏驱动(输入子系
统),三轴加速度计驱动(mma7660飞思卡尔的芯片)。
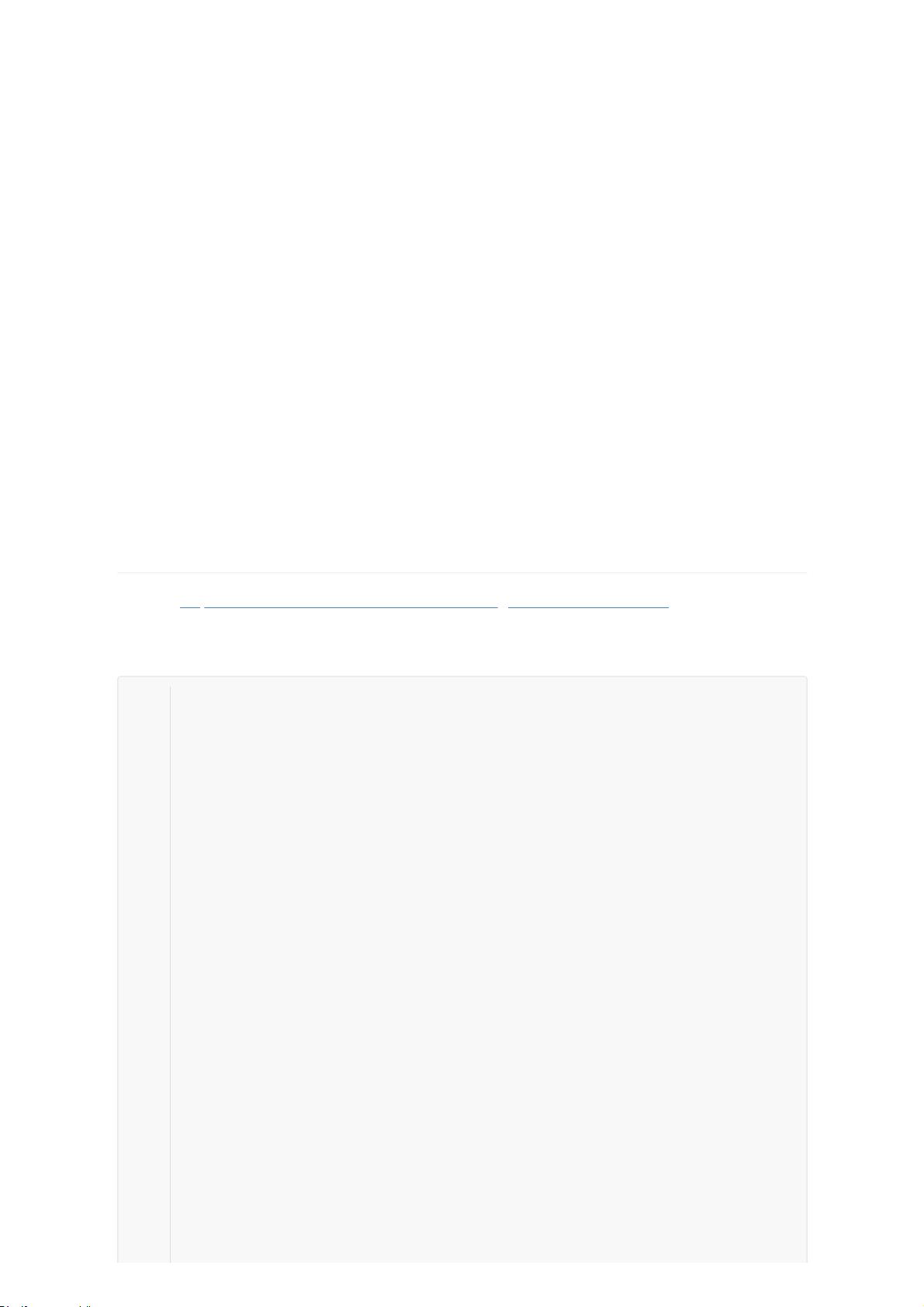
整个项目的代码布局如下:
如果把整个项目代码写完一遍,基本上Linux驱动、应用层编程都能够熟悉一遍。
涉及的技术点总结:
剩余16页未读,继续阅读
资源评论


DS小龙哥
- 粉丝: 5w+
- 资源: 900









最新资源
- 机械设计全自动智能台式面条机sw16非常好的设计图纸100%好用.zip
- 基于深度学习开发的课堂专注度分析和考试作弊检测系统python源码+文档说明
- 基于纹理特征的快速H.266/VVC编码单元划分决策方法研究与应用
- node + mysql + navicat Premium 15实现简单增删改查,适合小白
- 基于单矢量控制的永磁同步电机模型预测电流控制Simulink仿真模型 对应学习资料: 1.带一份与仿真对应的Word详细说明报告 2.一份与仿真对应的详细讲解PPT 针对具体被控对象(PMS
- 光伏电池simulink仿真模型 光伏电池建模仿真 包括改变温度 改变辐照度的特性分析 模型可跑通 结果正确 参考资料:根据lunwen做的,提供原始的lunwen 模型版本:2015a和2022b
- 定期检索的iptv视频源列表
- MATLAB Simulink仿真可运行,蓄电池储能,储能控制策略,双向斩波、恒流充电、限压充电、恒压控制、组合控制,电流电压双闭环控制,充放电控制策略 有参考资料
- 基于Python卷积神经网络CNN的猫狗图像分类源码+数据集(高分项目)
- 山东大学人工智能导论概念汇总
- 带负载转矩前馈补偿的永磁同步电机无感FOC 1.采用龙伯格负载转矩观测器,可快速准确观测到负载转矩; 2.将观测到的负载转矩用作前馈补偿,可提高系统抗负载扰动能力; 3.提供算法对应的参考文献和仿真模
- buck变器的simulink开环仿真、电压环闭环仿真,电流环闭环仿真,电压电流环双闭环仿真 Buck 电路 simulink 仿真 buck 电路 电流开环控制 电流闭环控制 闭环控制包括:P
- 基于卷积神经网络的猫狗识别Python实现源码+数据集(高分毕业设计项目)
- 使用Java实现邮件发送功能,邮件发送API JavaMail
- 双机并联同步发电机仿真模型 并联同步发电机 1.两台VSG并联,开始各自带负载10KW,在0.3秒的时候加入公共负载10KW,稳定后两台VSG可以均分公共负载的功率 2.输出的三相电压电流波形THD<
- 定义开发新范式 Amazon Q Developer 的极简开发工坊 实践手册
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


