



1.Overview
1 Overview
FANUC Robot Interface (FRRJIF.DLL) is Windows software module to read/write robot data with
robot over Ethernet.
Read:
I/O, current position, numeric
registers, position registers, string
registers, system variables, KAREL
variables, program task status, and
alarms
Write:
I/O, numeric registers, position
registers, string registers, system
variables, and KAREL variables
(*) FANUC Robot Interface does not support file transferring. Please use FTP or HTTP
for it.
- 1 -

1.Overview
FANUC Robot Interface is an ActiveX module. This document describes software interface of it.
FRRJIF.Core object provide methods to read/write robot I/O. It is possible to read/write area of
integrated PMC.
For accessing current position, position registers, string registers, comments, system variables,
KAREL variables, program status and alarm history, it is necessary to add needed data to DataTable
object (FRRJIF.Core.DataTable) at first. FRRJIF reads all of DataTable object at a time. It is called
‘Refresh’. Read values are kept until next refresh.
(*) DataTable for reducing read data by accessing data at a time.
A robot can have one connection with FANUC Robot Interface. A robot cannot have multiple
connections between multiple PCs. A robot cannot have multiples connections between multiple
applications on a PC. If multiple PCs or multiple applications access to a robot with FANUC Robot
Interface, it is not guaranteed.
You need to purchase one FANUC Robot Interface (A08B-9410-J575) to one development PC. For
additional PCs that are not for development, you do not need to purchase additional FANUC Robot
Interface. License registration and USB protector is not necessary from V3.0.0.
FANUC Robot Interface does not have file transfer functions. You can use FTP to transfer files
between PC and robot.
- 2 -
1.Overview
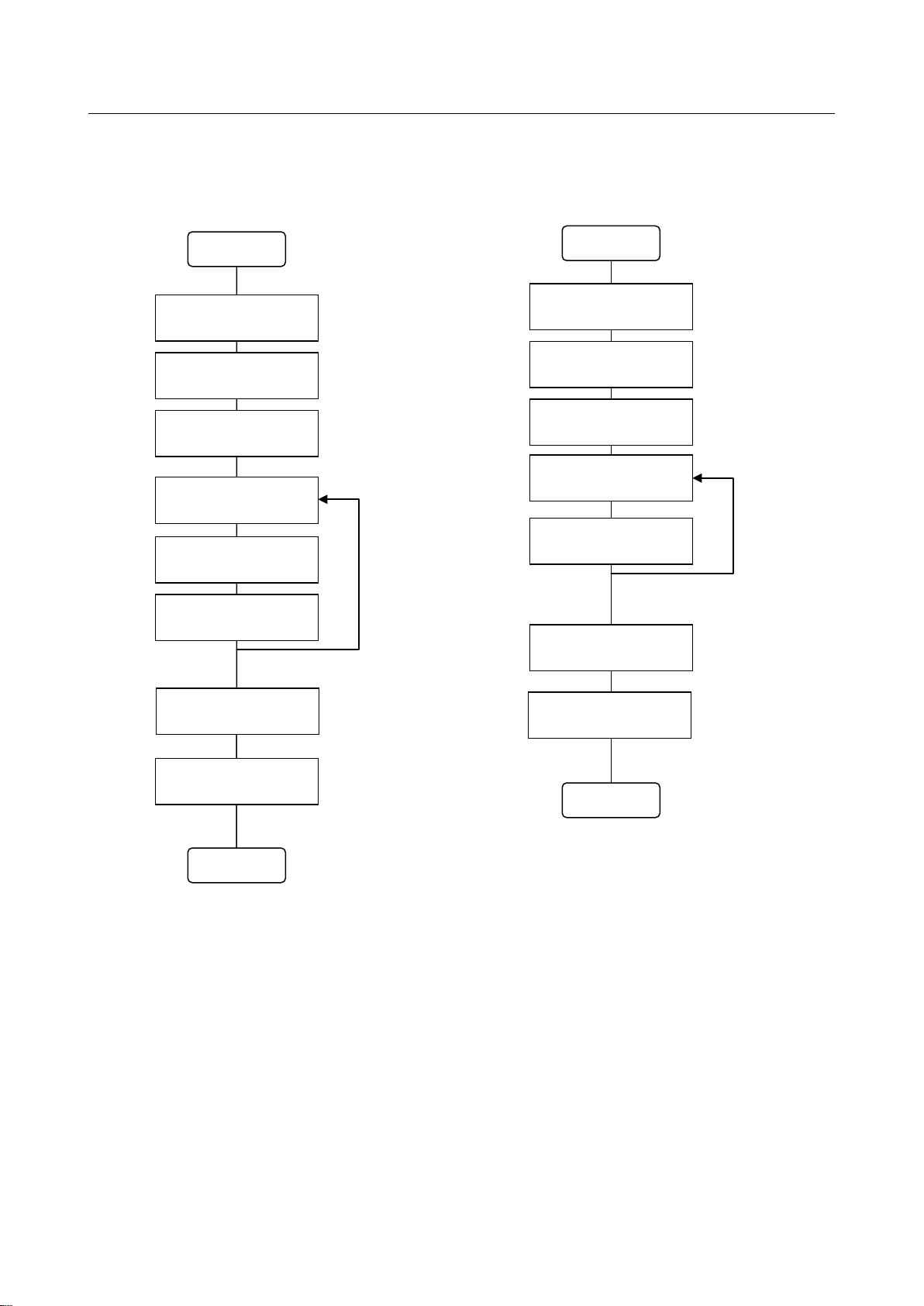
- Basic Flow
<Data Read> <Data Write>
(*) When communication is terminated, communication error or time out occurs, please remove all robot
interface objects. It is necessary to create objects in order to start communication again.
(*) The data reading is a kind of polling procedure for monitoring. It is not possible to get all data
transition since robot interface applications can read data periodically.
Start
End
Create Core Object
Set DataTable
Connect
DataTable.Refresh
Read Data
Read I/O
Start
End
Create Core Object
Set DataTable
Connect
Write Data
Write I/O
Remove Objects
Disconnect
Continue
Continue
Disconnect
Exit or Error
Exit or Error
Remove Objects
- 3 -
2.Environment
2 Environment
OS:
Windows 7(32bit), Windows 7(64bit) (*1),
Windows 8.1(32bit), Windows 8.1(64bit) (*1)
Windows 10(32bit), Windows 10(64bit) (*1)
Development language:
Microsoft Visual Basic 6.0 + Service pack6 (*2)
Microsoft Visual Basic 2008 + Service pack1
Microsoft Visual Basic 2010, 2012, 2013, 2015
Microsoft Visual C++ 6.0 + Service pack6 (*2)
Microsoft Visual C++ 2008 + Service pack1
Microsoft Visual C++ 2010, 2012, 2013, 2015
Microsoft Visual C# 2008 + Service pack1
Microsoft Visual C# 2010, 2012, 2013, 2015
Robot Controllers:
R-J3iB 7D80/45 or later
R-J3iB 7D81/09 or later
R-J3iB 7D82/01 or later
R-J3iB Mate 7D91/01 or later
R-30iA, R-30iA Mate All Versions (*3)
R-30iB All Versions (*3)
R-30iB Plus All Versions (*3)
ROBOGUIDE: (*4)
ROBOGUIDE V7 Rev.F(7N06) or later
Virtual Robot R-30iA 7DA5/15 or later
Virtual Robot R-30iA 7DA7/13 or later
Virtual Robot R-30iB All Versions
Virtual Robot R-30iB Plus All Versions
PC must communicate with robot over Ethernet. (Noise must not stop the communication. Correct
security settings are needed. )
(*1) Even if you use Windows x64, you need to develop 32bit application with robot interface, not
64bit application. You need to specify your project as x86. And you need to disable the Visual studio
hosting process in debug setting. Windows RT is not supported. Windows Store Application is not
supported. Windows Universal Application is not supported.
(*2) You can develop robot interface applications on only Windows XP for Visual Basic 6.0 and Visual
C++ 6.0.
(*3) If R650 FRA Params is selected, R553 "HMI Device (SNPX)" is needed. If R651 FRL Params is
selected, no option is needed.
(*4) Please refer "6. Connect To ROBOGUIDE".
(*) Please refer "Ethernet Function Operator's Manual" of robot controller.
- 4 -

2.Environment
(*) Windows, Visual Basic, Visual C++, Visual C# is a registered trademark of Microsoft Cooperation in
the United States and other countries.
- 5 -













