Colin Calas School of Engineering, Cardiff University August 2017
Abstract
This document presents a model prective control – MPC – algorithm aiming to autonoumously drive
an Unmanned Surface Vehicle – USV – towards a set of waypoints. The design of the algorithm has
been thinked to be robust to environmental disturbances encountered in the marine environment.
The modelling of the USV and disturbances have been simplified as this work is aimed to be a proof
of concept: a more accurate modelling should be considered for a real world implementation.
Introduction
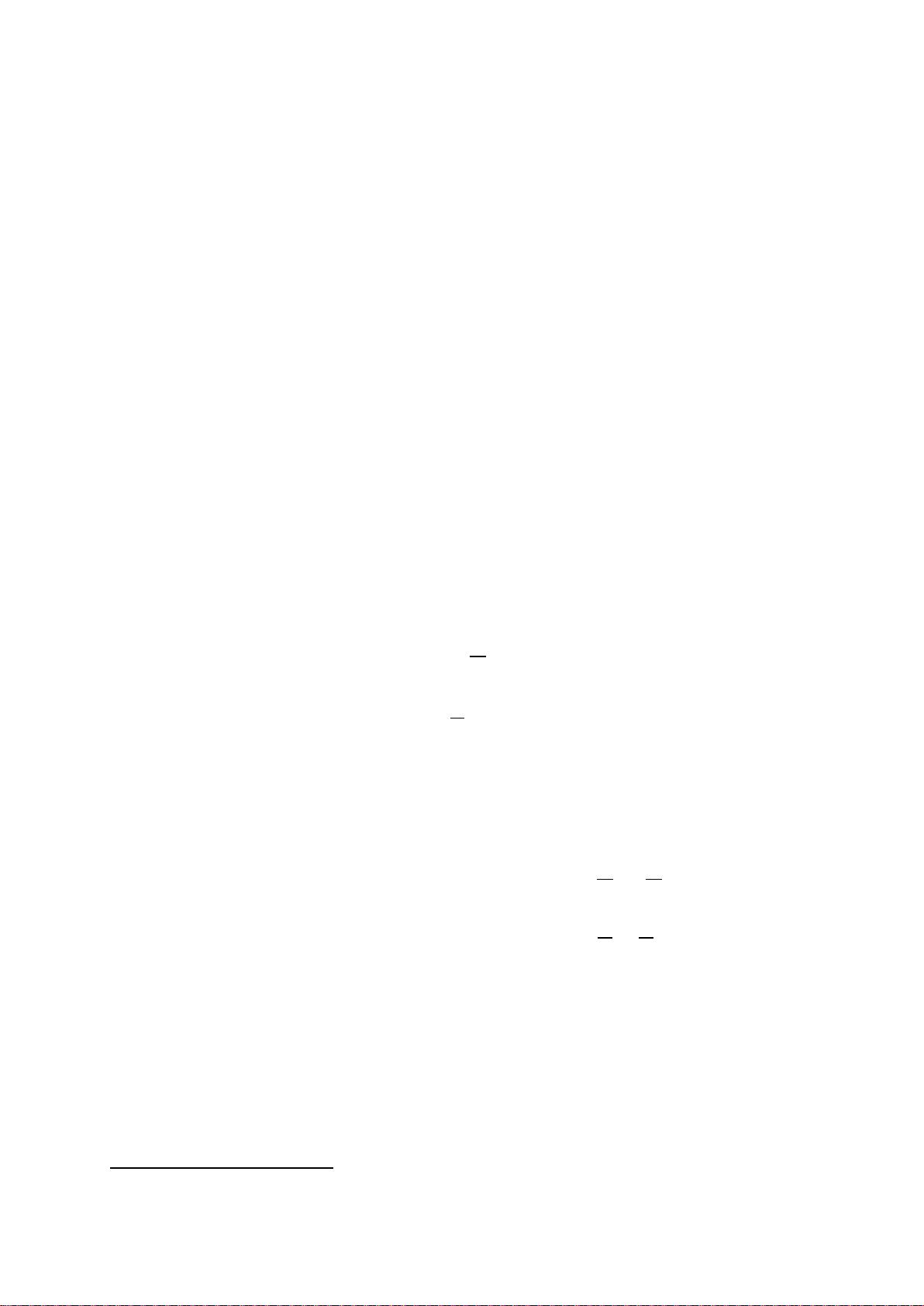
This work follows a previous one where the goal was to autonomously control an USV over a set of
waypoints. A MPC algorithm with constant position reference - i.e. the current waypoint - tracking
was implemented but this control scheme was not achieving good tracking performances. The
problem could come from the optimization that was done over the position variables in the global
frame which expressions are non-linear. Thus it was decided to recast the MPC strategy to make the
optimization simpler using angular and forward speed variables – which expression are fully linear in
the boat’s frame - into the optimization problem.
In this new version, the algorithm tries to track both angle and forward speed references over a
constant time horizon. The boat model was rewritten in a simpler but yet accurate way and an
"intelligent" reference providing algorithm was written to make the system more robust to
disturbances.
The first point that will be addressed is the modelling of the USV, followed by the tracking strategy
used. Then the reference providing algorithm - including dealing with disturbances - will be explained
and finally the MPC algorithm and the results obtained.
USV modelling
This part explains the physics used to describe the USV behavior and how this was modeled so it can
be used into an MPC scheme.
Physical description
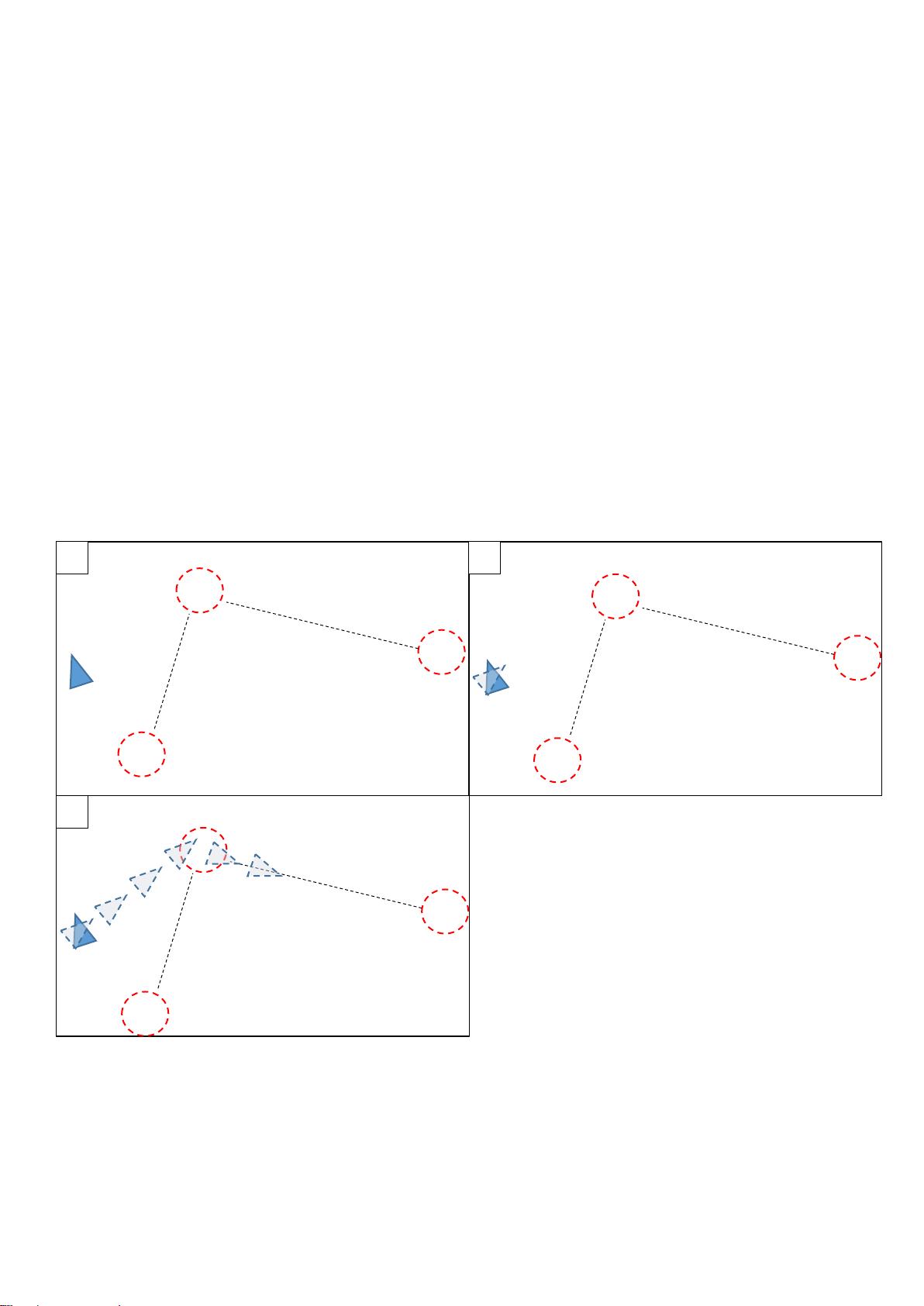
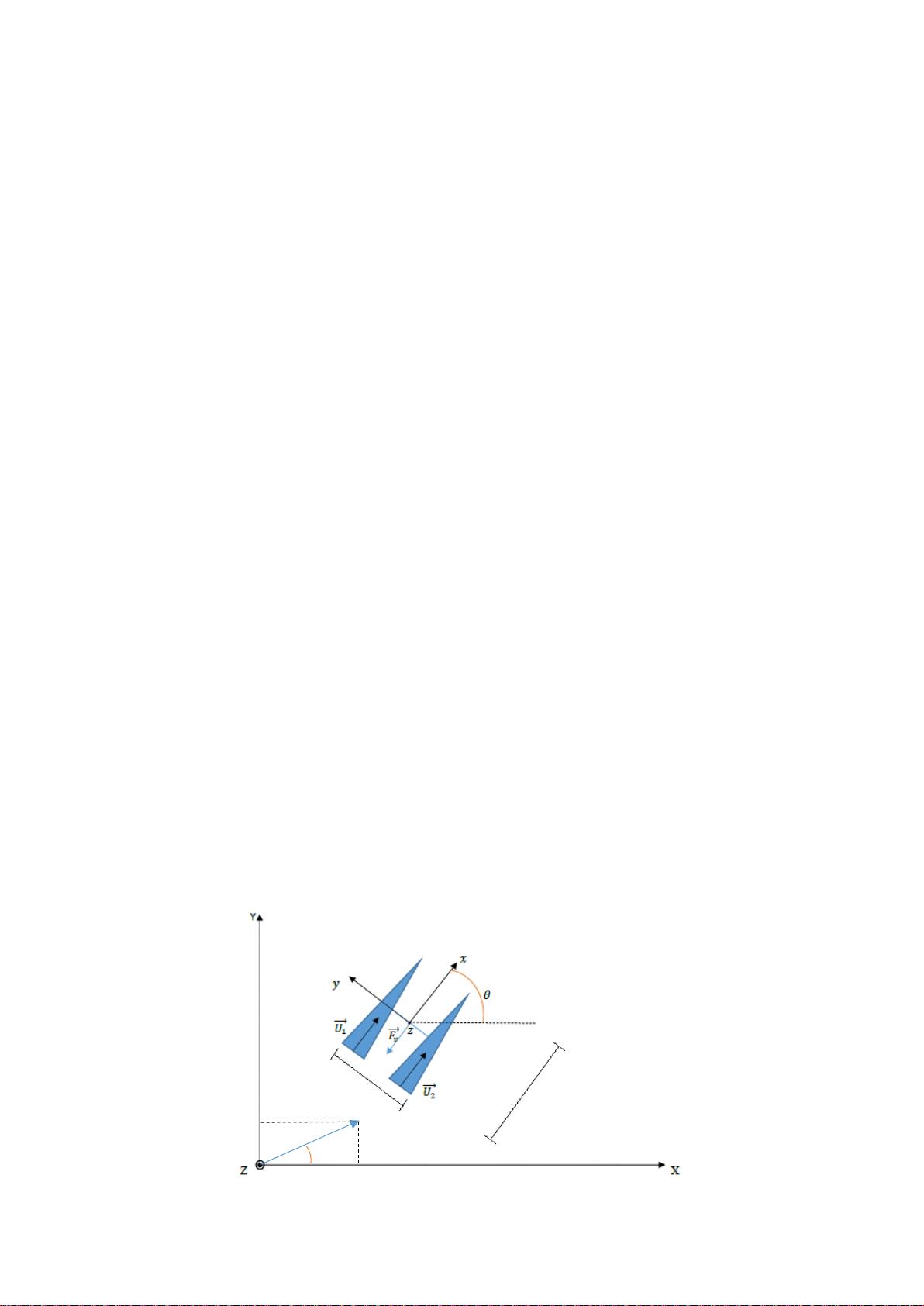
The USV studied here has a catamaran-like structure with two static propellers at the end of each
hull.
The figure below provides a graphic view of the boat and the forces that applies to him.
D
x
D
Y
D