

1.1、机器人位置控制
工业机器人控制方式有不同的分类,如按被控对象可分为位
置控制、速度控制、加速度控制、力控制、力矩控制、力和
位置混合控制等,其中位置控制是机器人的最基本的控制任
务。
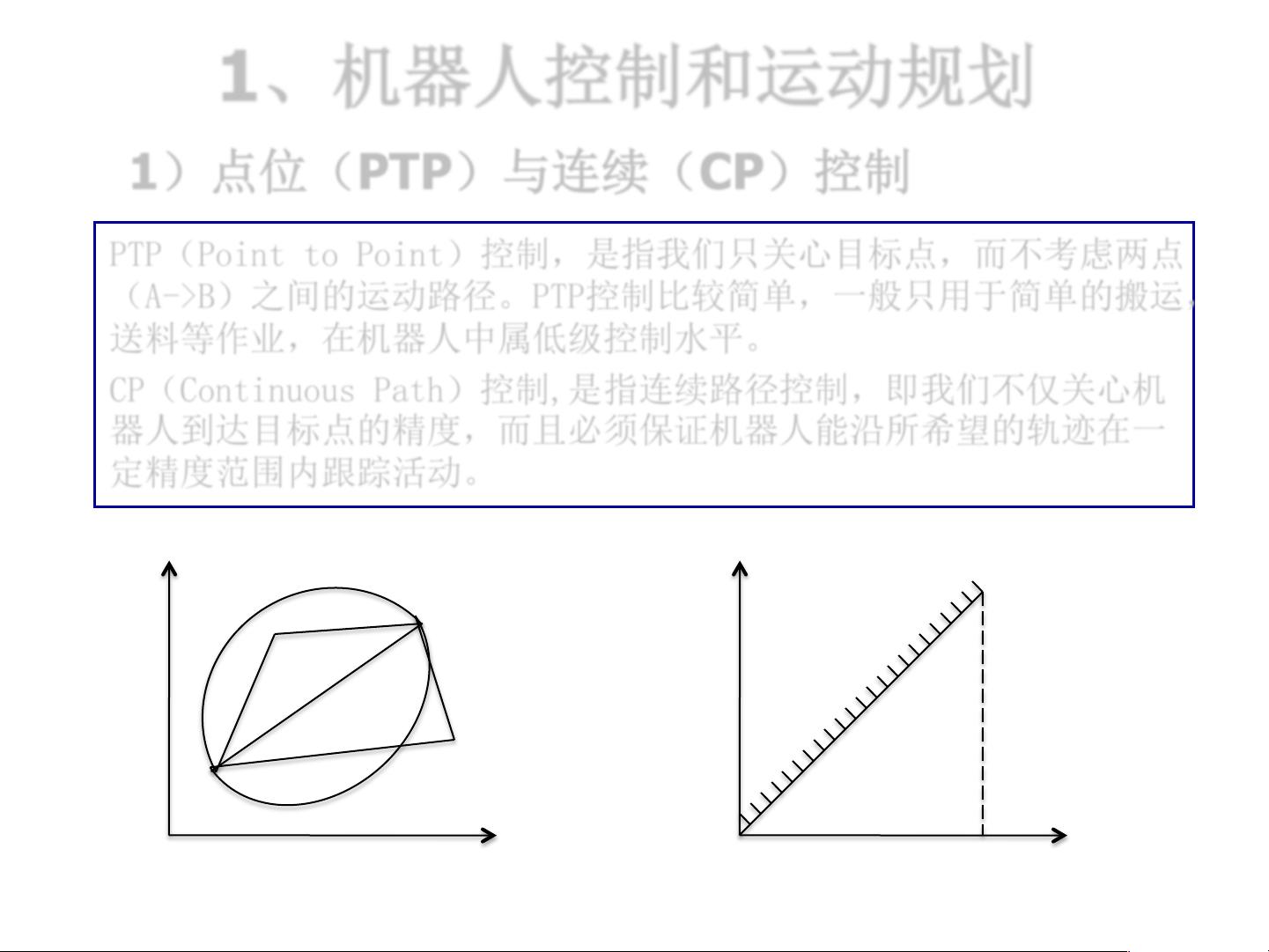
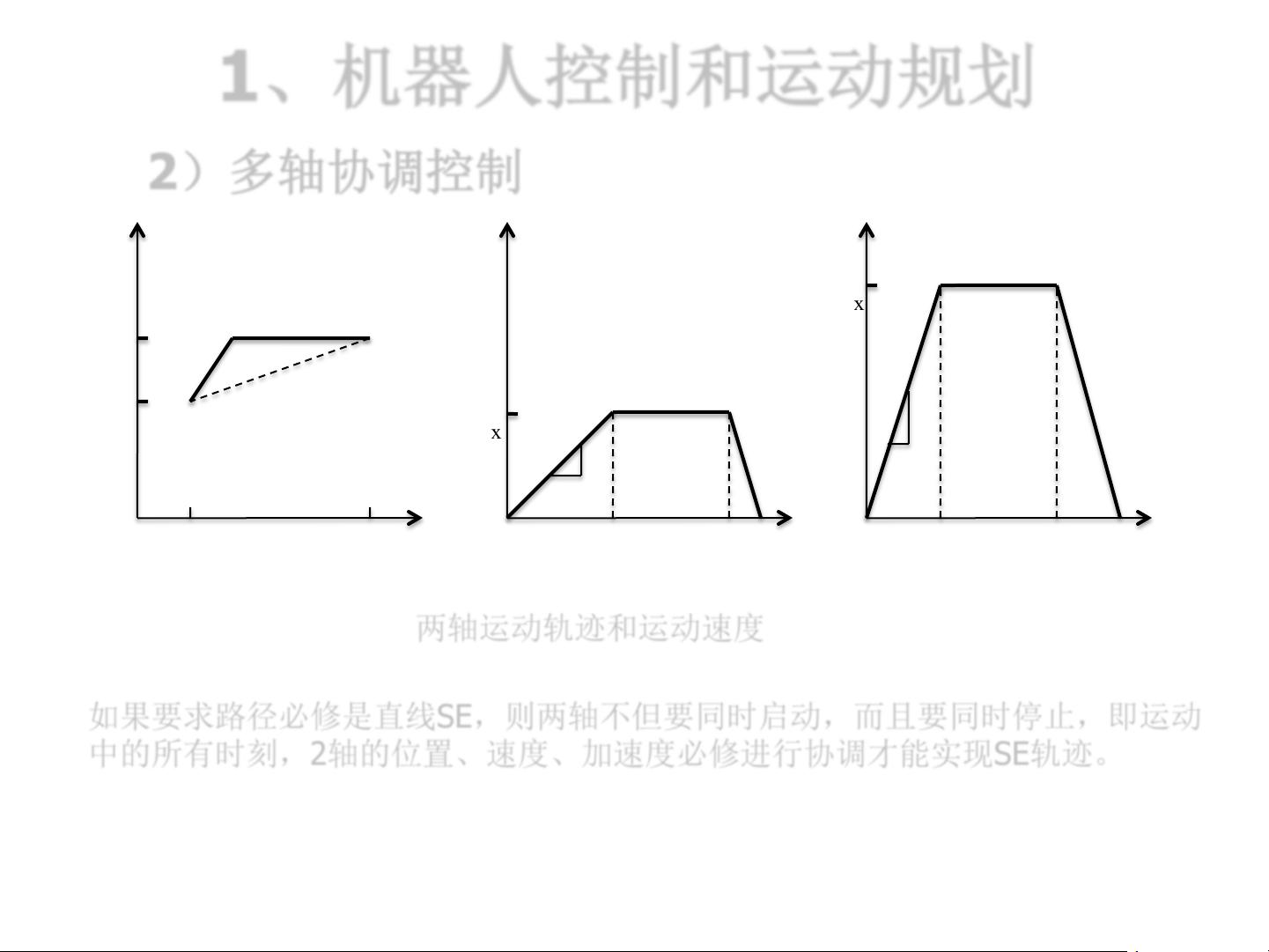
1、机器人控制和运动规划
机器人的很多作业是控制机器人末端工具的位置和姿态,以
实现点到点的控制(如搬运、点焊机器人)或连续路径控制
(如弧焊、喷漆机器人),因此实现机器人的位置控制是机
器人的基本控制任务,它也称为位姿控制或轨迹控制。


剩余31页未读,继续阅读
资源评论


wxg520cxl
- 粉丝: 25
- 资源: 3万+









最新资源
- 基于Java的共享客栈管理系统+jsp(Java毕业设计,附源码,数据库,教程).zip
- 基于Java的菜匣子优选系统设计与实现+jsp(Java毕业设计,附源码,数据库,教程).zip
- 基于springboot+Vue的电影院购票系统2(Java毕业设计,附源码,部署教程).zip
- 基于springboot+Vue的电影院购票系统(Java毕业设计,附源码,部署教程).zip
- 基于springboot+Vue的电商应用系统的设计与实现(Java毕业设计,附源码,部署教程).zip
- 基于springboot+Vue的在线考试系统(Java毕业设计,附源码,部署教程).zip
- 基于SpringBoot+Vue的在线远程考试系统的设计与实现(Java毕业设计,附源码,部署教程).zip
- 基于JavaWeb的家居商城系统的设计与实现+jsp(Java毕业设计,附源码,数据库,教程).zip
- 基于SpringBoot+Vue的的游戏交易系统2(Java毕业设计,附源码,部署教程).zip
- 本地h264视频推流 Rtsp
- 基于SpringBoot+Vue的的中山社区医疗综合服务平台2(Java毕业设计,附源码,部署教程).zip
- 基于SpringBoot+Vue的的中山社区医疗综合服务平台(Java毕业设计,附源码,部署教程).zip
- 基于SpringBoot+Vue的在线课程管理系统的设计与实现(Java毕业设计,附源码,部署教程).zip
- 基于Java的汽车客运站管理系统的设计与实现+jsp(Java毕业设计,附源码,数据库,教程).zip
- PySpark数据处理技术大全
- 基于java的少儿编程网上报名系统+vue(Java毕业设计,附源码,数据库,教程).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


