2008-2012 Microchip Technology Inc. DS01160B_CN 第 1 页
AN1160
引言
本应用笔记介绍一种采用 dsPIC
®
数字信号控制器
(Digital Signal Controller, DSC)或 PIC24 单片机来
实现无刷直流 (Brushless Direct Current, BLDC)电
机无传感器控制的算法。该算法利用对反电动势
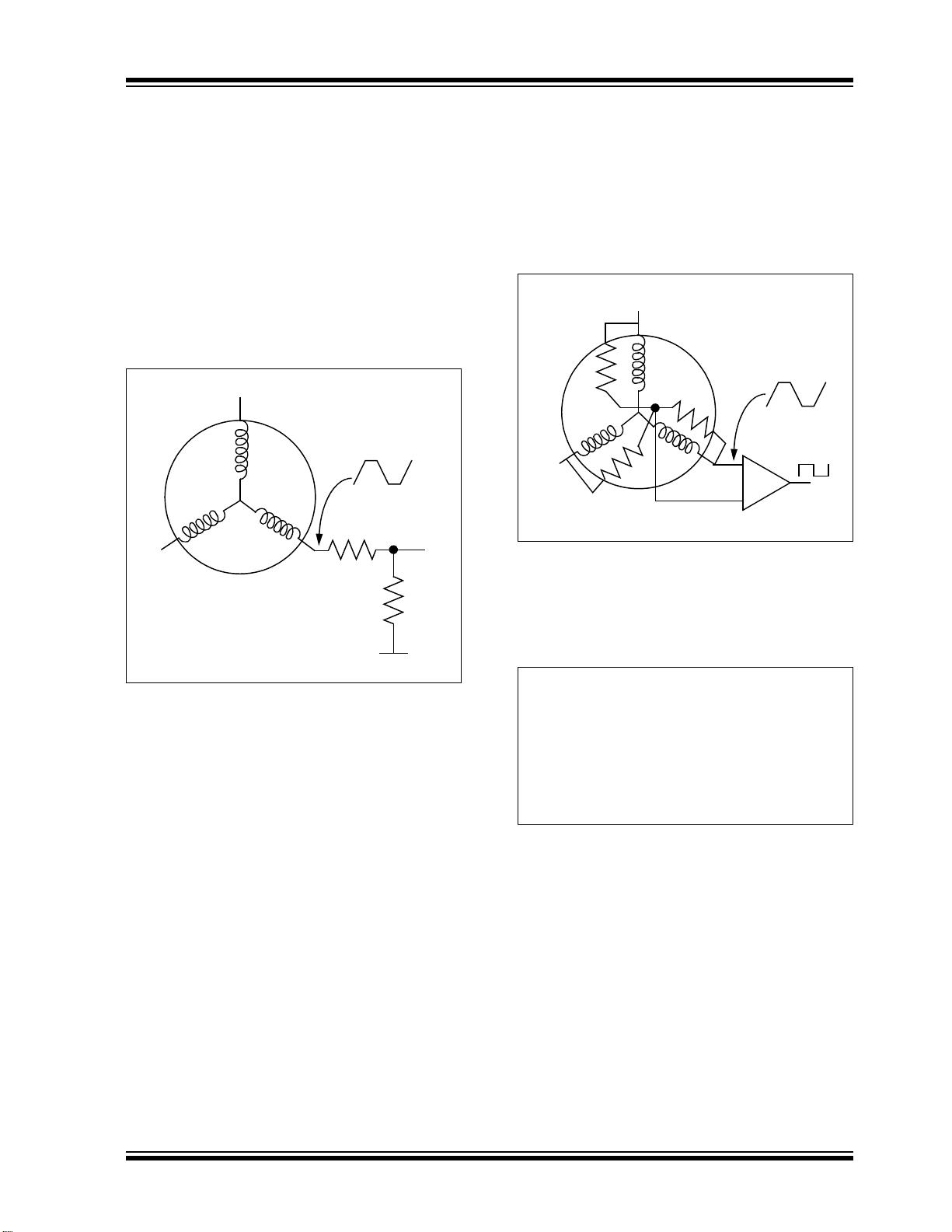
(Back-Electromotive Force,BEMF)进行数字滤波的
择多函数来实现。通过对电机的每一相进行滤波来确定
电机驱动电压换相的时刻。这一控制技术省却了分立的
低通滤波硬件和片外比较器。需指出,这里论述的所有
内容及应用软件,都是假定使用三相电机。该电机控制
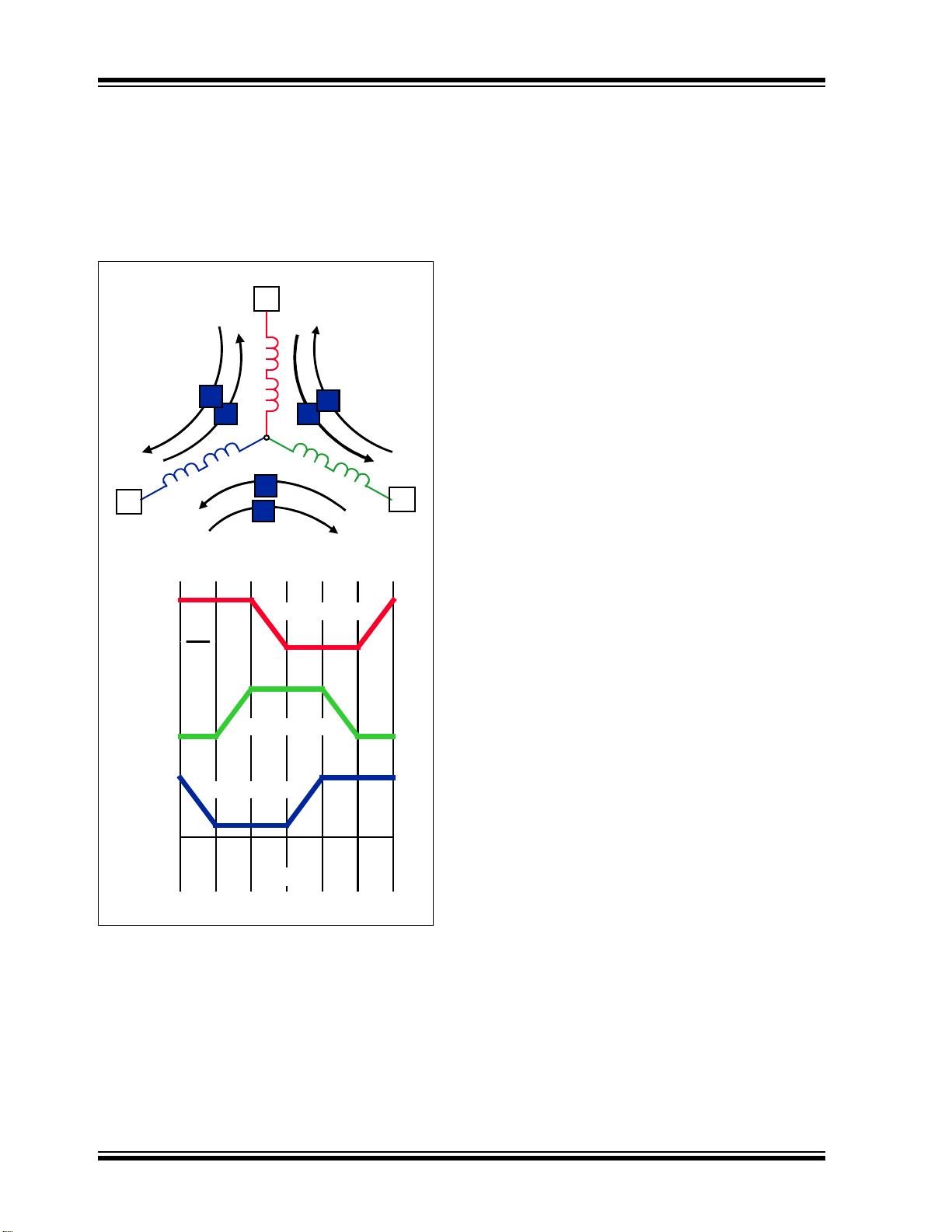
算法包括四个主要部分:
• 利用 DSC 或单片机的模数转换
器(Analog-to-Digital Converter,ADC)来采样梯
形波 BEMF 信号
•PWM导通侧 ADC 采样,以降低噪声并解决低电感
问题
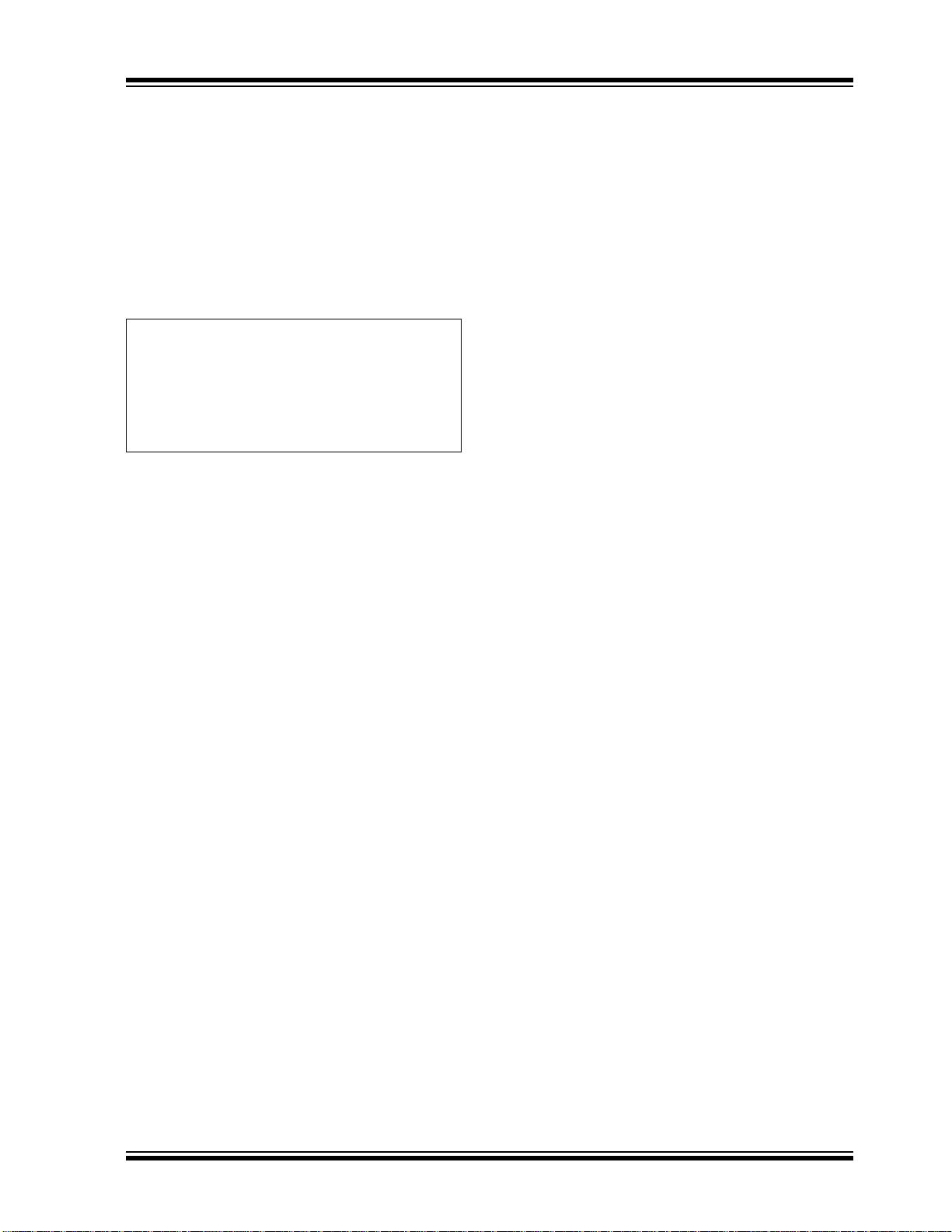
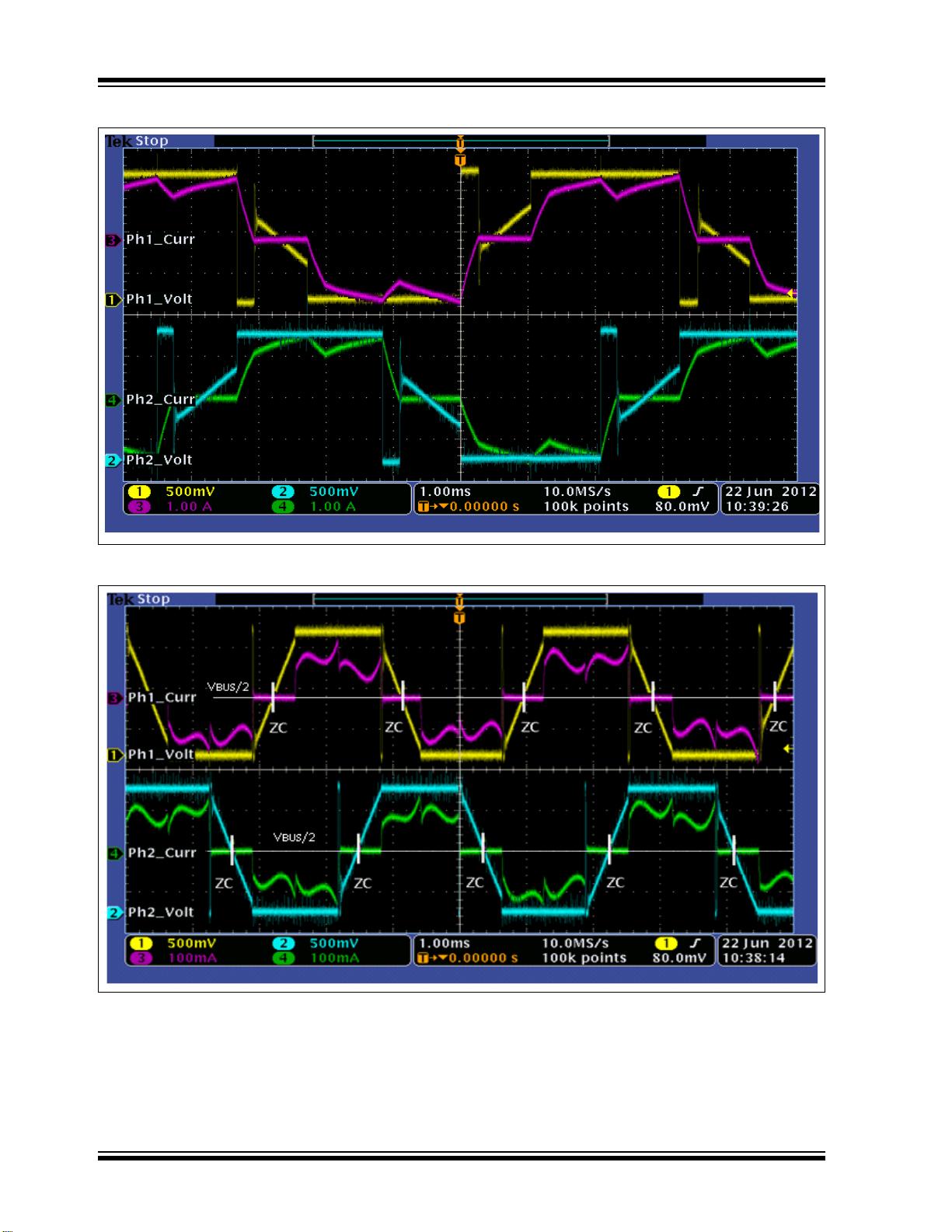
• 将梯形波BEMF信号与V
BUS/2进行比较,以检测过
零点
• 用择多函数滤波器对比较结果信号进行滤波
• 以三种不同模式对电机驱动电压进行换相:
- 传统开环控制器
- 传统闭环控制器
- 比例 - 积分(Proportional-Integral,PI)闭 环
控制器
这种新的控制方法是一种基于单片 16 位 PIC
®
MCU 或
dsPIC DSC 器件的解决方案。所需的外部硬件仅为几个
电阻,用来将 BEMF 信号限制在器件 ADC 模块的工作
电压范围内。
有传感器控制与无传感器控制的对比
由于 BLDC 电机具有尺寸小、可控制性好、效率高的特
点,常用于消费和工业应用中。 BLDC 电机还愈来愈多
地出现在汽车应用中用来取代传送带和液压系统,提供
额外功能和提高燃油经济性,同时消除维护成本。
由于电励磁必须与转子位置同步,因此 BLDC 电机在运
行时,通常需要一个或多个转子位置传感器。由于成
本、可靠性、机械包装的原因,特别是当转子在液体中
运行时,电机适宜在无位置传感器的条件下运行,即通
常所说的无传感器运行。
通过检测不通电相绕组上的BEMF电压可以确定电机驱
动电压的换相时间。然而,无传感器控制也有一些缺点:
• 由于 BEMF 足够大时才能被检测到,因此电机必须
运行在最低转速以上
• 电机负载突变可能引起 BEMF 驱动环失锁
如果低成本是应用中关注的主要问题,且无需电机在低
速下运行,以及预料电机负载不会发生快速地变化,那
么在这种情况下,无传感器梯形波控制就可能是应用中
的较好选择。但某些特定算法能够克服上面所列出的全
部缺点。
基于以下几个原因,推荐您采用本文档所述的 BEMF 过
零检测技术:
• 适用于多种电机类型
• 理论上,这种技术可用于星形和三角形连接三相电
机
• 无需详细了解电机参数
• 对于电机的制造公差差异不太敏感
作者:
Adrian Lita
和
Mihai Cheles
Microchip Technology Inc.
用择多函数实现反电动势滤波的无传感器 BLDC 控制