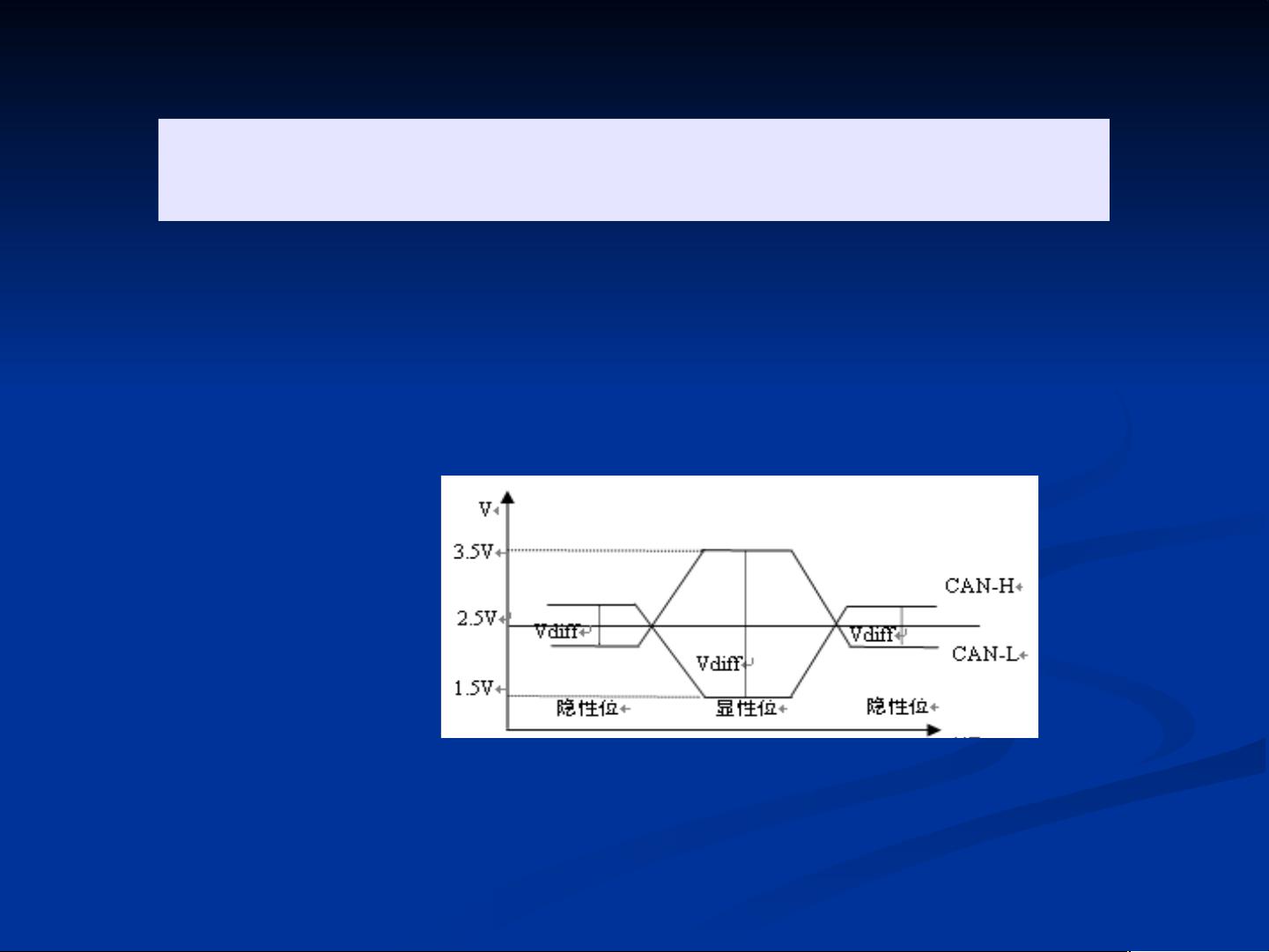
**CAN接口要点** CAN(Controller Area Network)接口是一种广泛应用在汽车、工业自动化、机械工程等多个领域的串行通信协议。它最初由德国BOSCH公司设计,目的是为了在现代汽车内部的多个控制和测试设备之间高效地交换数据。随着时间的推移,CAN总线的应用已经扩展到了过程工业、机械工业、机器人技术、数控机床、传感器等领域。 **1. CAN协议标准化** 1993年,CAN协议被国际标准化组织ISO正式颁布为ISO 11898标准,这进一步推动了其在全球范围内的广泛应用。 **2. 主要特性** - **传输速率**: CAN支持高达1Mbps的传输速率,但当距离超过40米时,速率会有所降低。 - **传输距离**: 在5kbps的较低速率下,CAN总线能支持长达10千米的通信距离。 - **介质支持**: 它可以使用铜线或光纤作为通信介质。 - **媒体访问控制**: 采用CSMA/CD(Carrier Sense Multiple Access with Collision Detection)机制,但CAN采用了非破坏性的优先级仲裁来避免冲突。 - **节点数量**: 最大可挂接110个节点。 **3. 电气特性** - **差分电压**: CAN_H和CAN_L两条信号线构成,静态时两线均为2.5V,表示逻辑“1”。当CAN_H高于CAN_L,即电压为CAN_H=3.5V和CAN_L=1.5V时,表示逻辑“0”。 **4. 报文结构与通信方式** - **报文类型**: 包括数据帧、远程帧、错误帧和过载帧。 - **数据域**: 数据帧中的数据长度可为0-8个字节。 - **优先级**: CAN网络中的节点按ID划分优先级,采用非破坏性仲裁。 - **错误处理**: 当检测到错误时,节点会自动关闭输出,并发送错误帧。 **5. 通信模式** - **点对点**: 直接从一个节点发送到另一个节点。 - **一点对多点**: 一个节点向多个节点广播数据。 - **全网广播**: 所有节点都能接收到相同的信息。 **6. 应用场景** 由于CAN协议的可靠性、鲁棒性和低功耗特性,它特别适合在恶劣环境或需要实时通信的场合使用,如工业自动化生产线和分布式控制系统。 **7. 特别提及** LF24xx系列的DSP控制器,如LF240X,集成了CAN控制模块,使得设计分布式或网络化的运动控制系统变得更加便捷。 **总结** CAN总线凭借其独特的特性,如优先级仲裁、错误检测和恢复能力,以及对多种通信模式的支持,成为分布式控制系统和实时通信网络的理想选择。随着技术的发展,CAN接口已经成为许多行业的标准,包括汽车行业和工业自动化,确保了数据的安全传输和系统的高效运行。
剩余33页未读,继续阅读
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~