
1
A Review on Deep Learning Techniques
Applied to Semantic Segmentation
A. Garcia-Garcia, S. Orts-Escolano, S.O. Oprea, V. Villena-Martinez, and J. Garcia-Rodriguez
Abstract—Image semantic segmentation is more and more being of interest for computer vision and machine learning researchers.
Many applications on the rise need accurate and efficient segmentation mechanisms: autonomous driving, indoor navigation, and even
virtual or augmented reality systems to name a few. This demand coincides with the rise of deep learning approaches in almost every
field or application target related to computer vision, including semantic segmentation or scene understanding. This paper provides a
review on deep learning methods for semantic segmentation applied to various application areas. Firstly, we describe the terminology
of this field as well as mandatory background concepts. Next, the main datasets and challenges are exposed to help researchers
decide which are the ones that best suit their needs and their targets. Then, existing methods are reviewed, highlighting their
contributions and their significance in the field. Finally, quantitative results are given for the described methods and the datasets in
which they were evaluated, following up with a discussion of the results. At last, we point out a set of promising future works and draw
our own conclusions about the state of the art of semantic segmentation using deep learning techniques.
Index Terms—Semantic Segmentation, Deep Learning, Scene Labeling, Object Segmentation
F
1 INTRODUCTION
N
OWADAYS, semantic segmentation – applied to still
2D images, video, and even 3D or volumetric data
– is one of the key problems in the field of computer
vision. Looking at the big picture, semantic segmentation
is one of the high-level task that paves the way towards
complete scene understanding. The importance of scene
understanding as a core computer vision problem is high-
lighted by the fact that an increasing number of applications
nourish from inferring knowledge from imagery. Some of
those applications include autonomous driving [1] [2] [3],
human-machine interaction [4], computational photography
[5], image search engines [6], and augmented reality to name
a few. Such problem has been addressed in the past using
various traditional computer vision and machine learning
techniques. Despite the popularity of those kind of methods,
the deep learning revolution has turned the tables so that
many computer vision problems – semantic segmentation
among them – are being tackled using deep architectures,
usually Convolutional Neural Networks (CNNs) [7] [8] [9]
[10] [11], which are surpassing other approaches by a large
margin in terms of accuracy and sometimes even efficiency.
However, deep learning is far from the maturity achieved
by other old-established branches of computer vision and
machine learning. Because of that, there is a lack of unifying
works and state of the art reviews. The ever-changing state
of the field makes initiation difficult and keeping up with
its evolution pace is an incredibly time-consuming task due
to the sheer amount of new literature being produced. This
makes it hard to keep track of the works dealing with se-
• A. Garcia-Garcia, S.O. Oprea, V. Villena-Martinez, and J. Garcia-
Rodriguez are with the Department of Computer Technology, University
of Alicante, Spain.
E-mail: {agarcia, soprea, vvillena, jgarcia}@dtic.ua.es
• S. Orts-Escolano is with the Department of Computer Science and
Artificial Intelligence, Universit of Alicante, Spain.
E-mail: sorts@ua.es.
mantic segmentation and properly interpret their proposals,
prune subpar approaches, and validate results.
To the best of our knowledge, this is the first review to
focus explicitly on deep learning for semantic segmentation.
Various semantic segmentation surveys already exist such
as the works by Zhu et al. [12] and Thoma [13], which do
a great work summarizing and classifying existing meth-
ods, discussing datasets and metrics, and providing design
choices for future research directions. However, they lack
some of the most recent datasets, they do not analyze
frameworks, and none of them provide details about deep
learning techniques. Because of that, we consider our work
to be novel and helpful thus making it a significant contri-
bution for the research community.
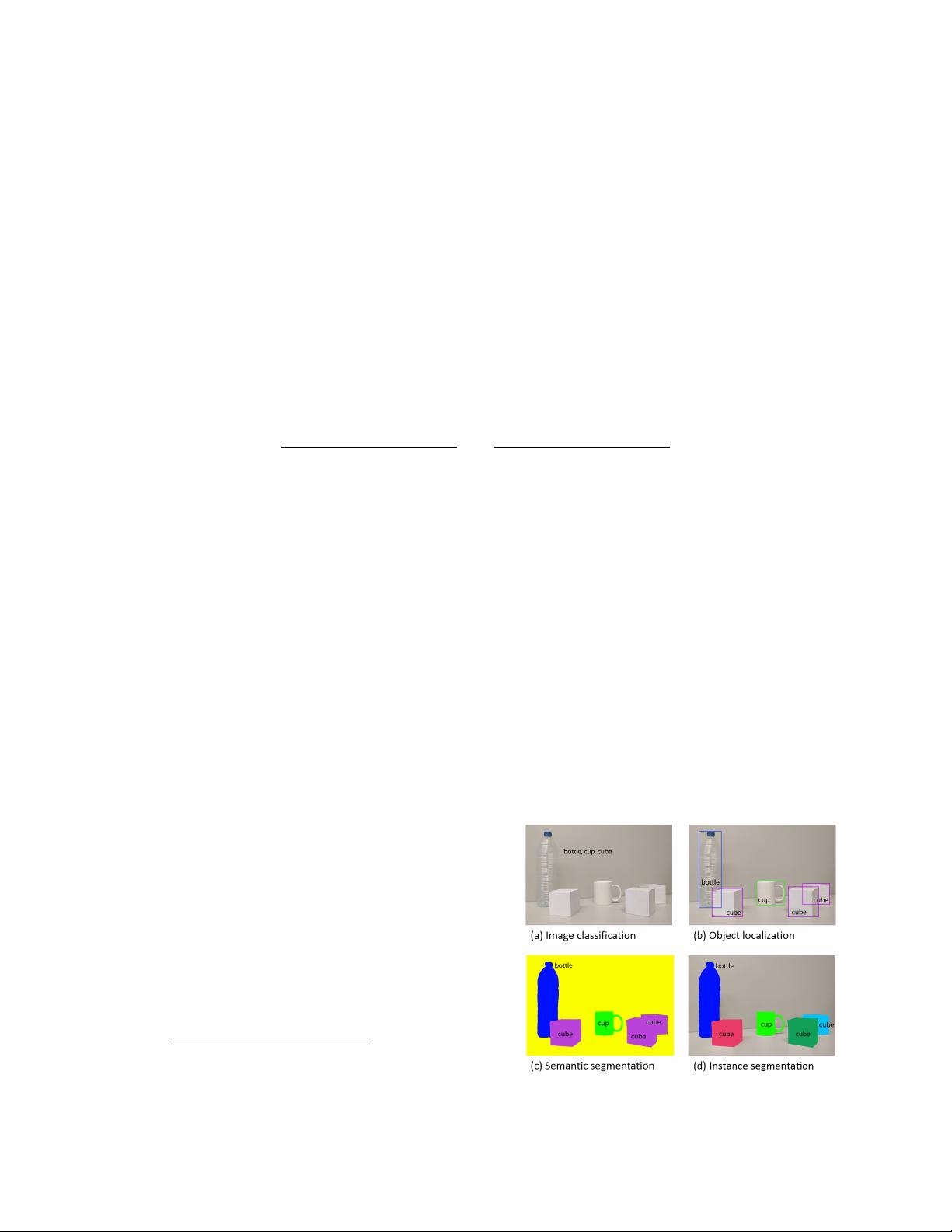
Fig. 1: Evolution of object recognition or scene understand-
ing from coarse-grained to fine-grained inference: classifica-
tion, detection or localization, semantic segmentation, and
instance segmentation.
arXiv:1704.06857v1 [cs.CV] 22 Apr 2017


剩余22页未读,继续阅读
资源评论


whd520hbababa
- 粉丝: 0
- 资源: 2









最新资源
- yoloface大礼包使用pytroch实现的基于yolov3的轻量级人脸检测(包含关键点).zip
- java项目,课程设计-校园闲置物品交易网站.zip
- 基于WinPcap的Windows平台入侵检测系统设计与实现
- linux-编程基础知识
- java项目,课程设计-体质测试数据分析及可视化设计.zip
- Spring Boot Maven插件的使用.pdf
- YOLO9000更好、更快、更强 - 实时物体检测 9000 个类别!.zip
- 基于Arduino的智能花盆(实现对盆栽植物的自动浇水)+项目源码+文档说明
- java毕业设计基于springboot的高校科研管理系统源码+数据库+文档说明
- 资源来自:https://github.com/1990571096/SRCNN-Pytorch
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


