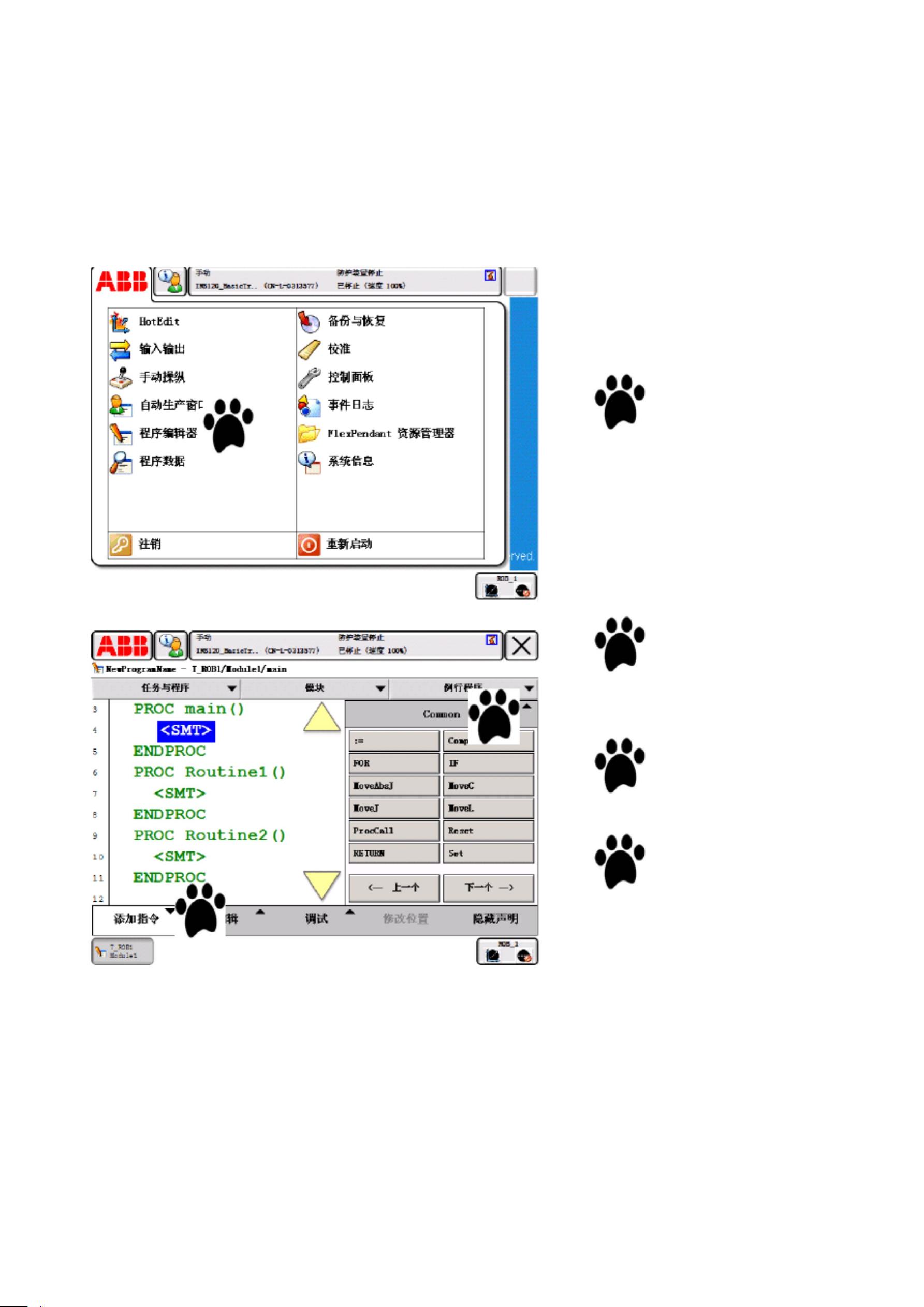
在ABB的RAPID编程环境中,理解并熟练运用各种指令对于编写高效、准确的机器人程序至关重要。以下是关于常用RAPID程序指令的详细说明:
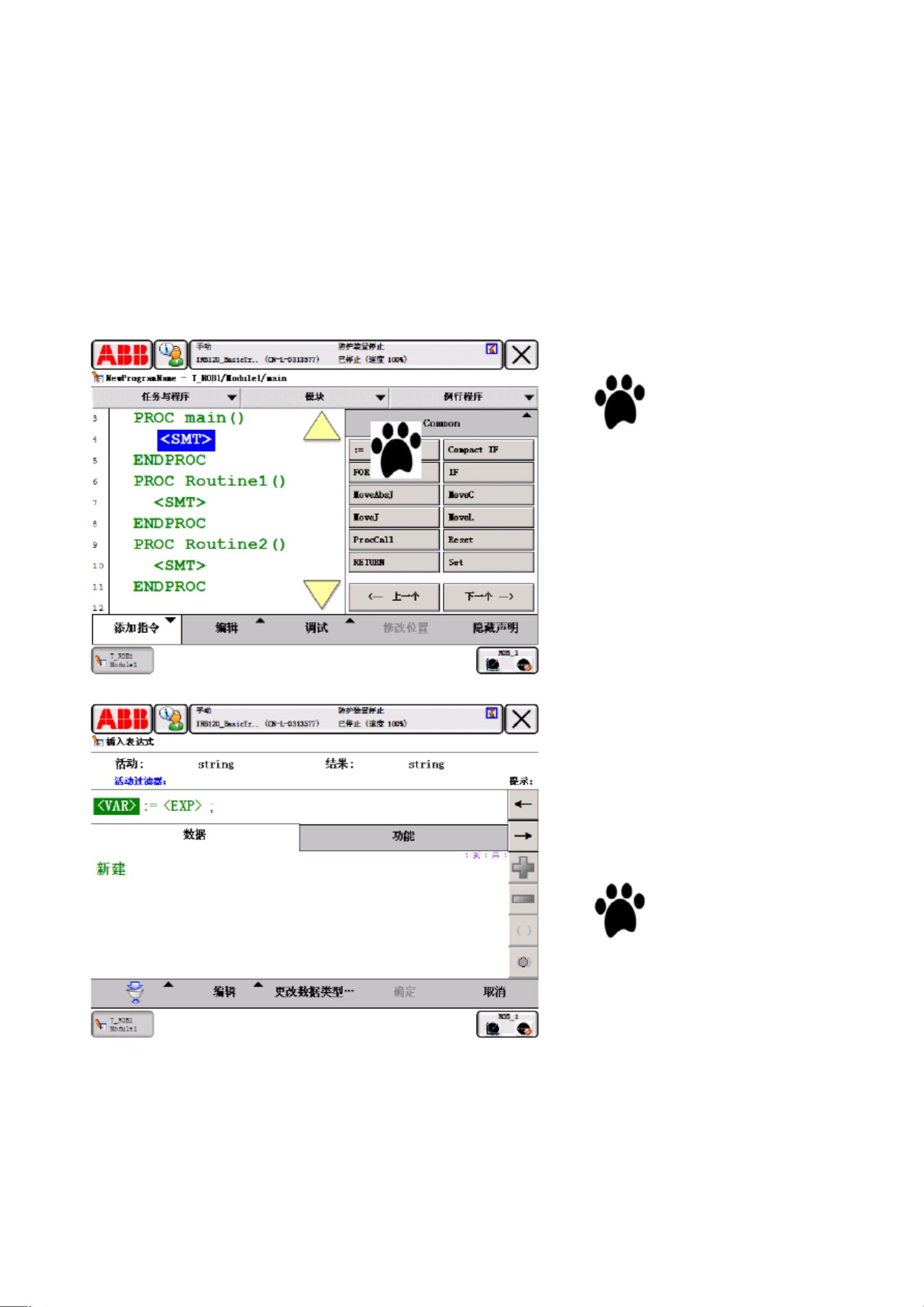
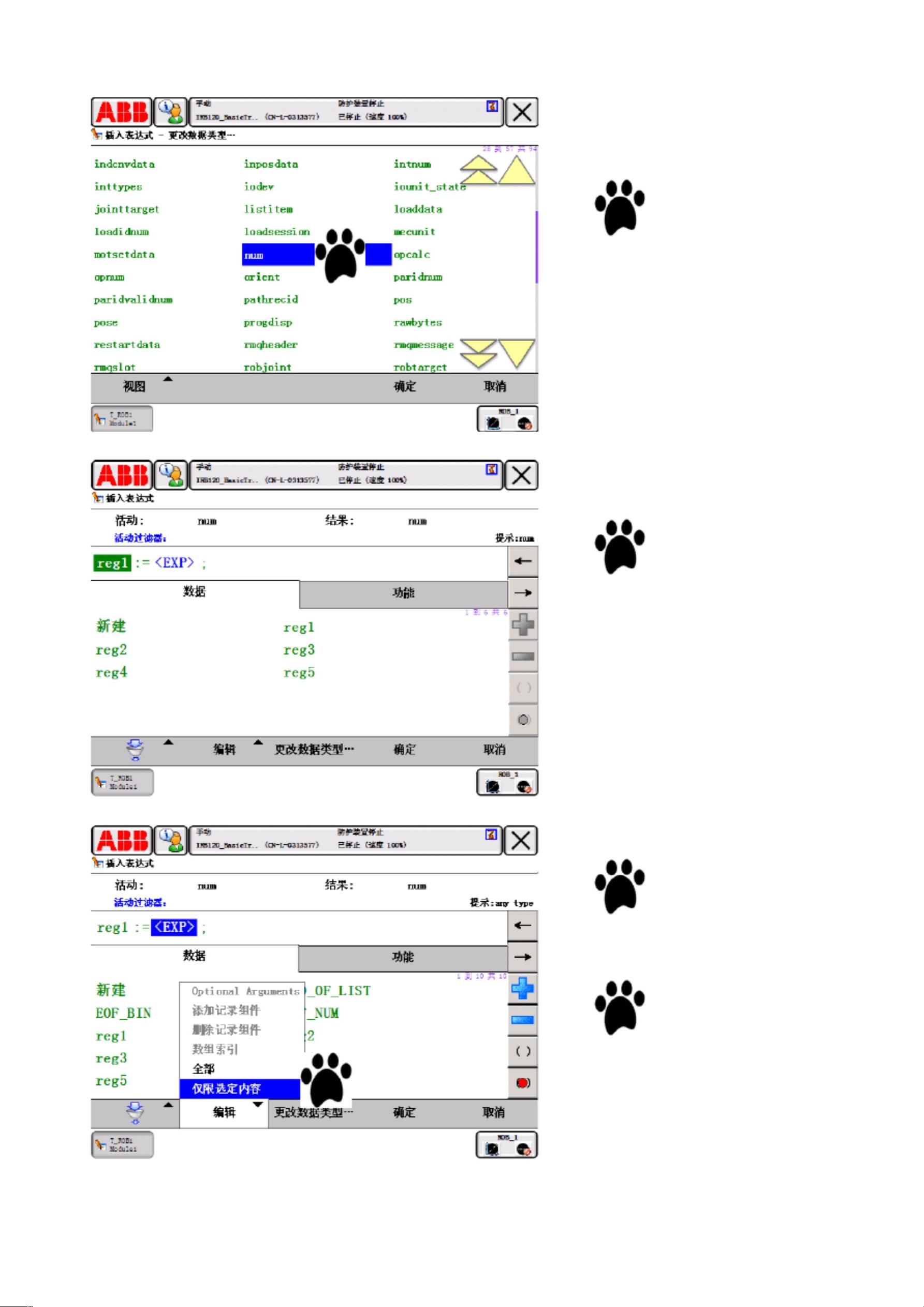
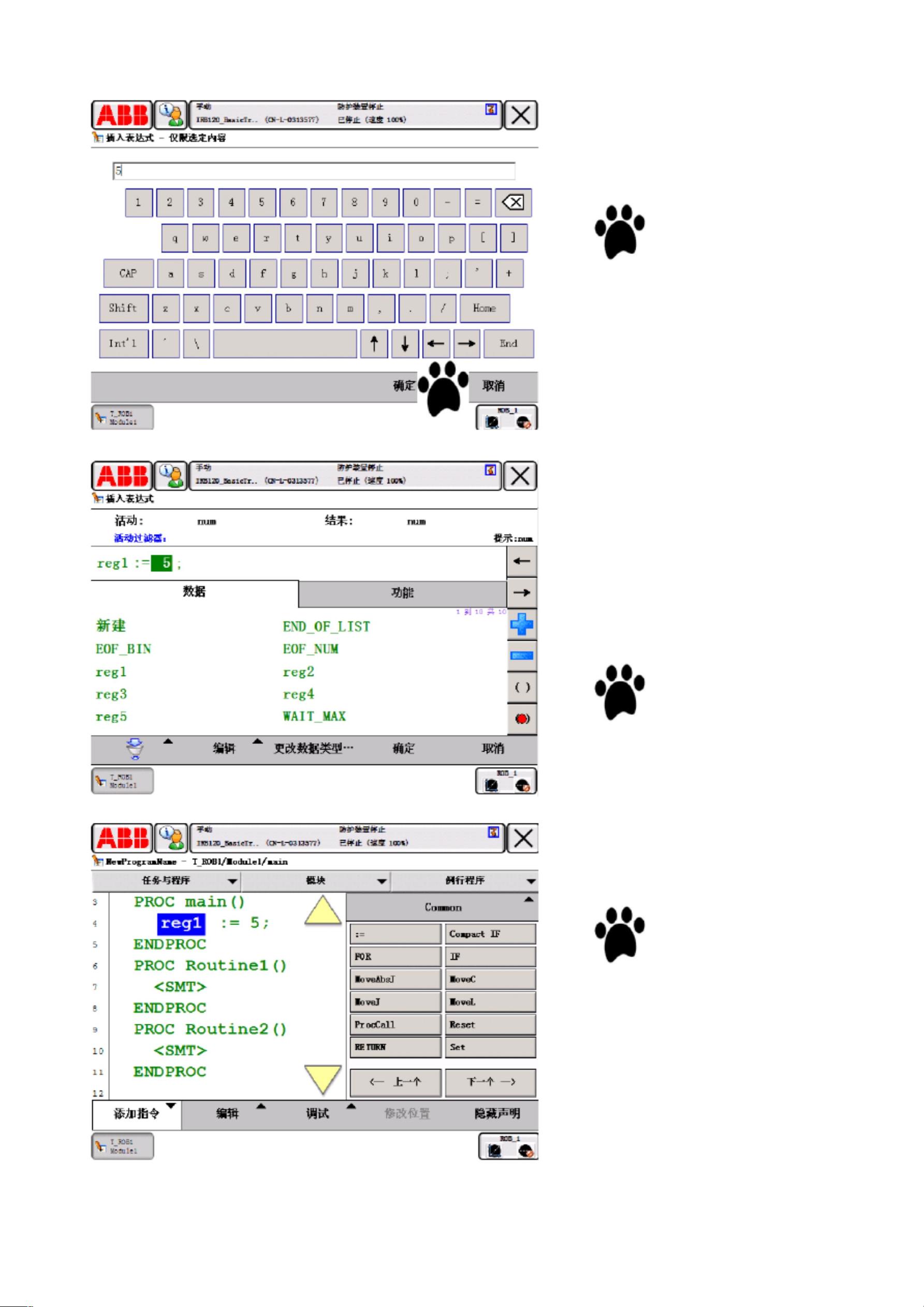
1. **赋值指令**: RAPID中的赋值运算符“:=”用于给变量赋值。例如,`reg1 := 5` 将数字5赋值给变量`reg1`。同时,可以使用数学表达式进行赋值,如 `reg2 := reg1 + 4`,这表示将`reg1`的值加上4然后赋给`reg2`。
2. **运动指令**:
- **绝对位置运动指令**: 使用`MoveL`指令,例如 `MoveL p10, v1000, z10, tool0;`,让机器人TCP(Tool Center Point)以速度v1000mm/s、转弯区z10到达点P10,使用工具坐标tool0。
- **关节运动指令**: 使用`MoveJ`,例如 `MoveJ p10, v1000, z10, tool0;`,进行关节运动至目标点P10。
- **线性运动指令**: 使用`MoveL`同样可实现线性运动,例如 `MoveL p20, v1000, z10, tool0;`。
- **圆弧运动指令**: 使用`MoveC`,如 `MoveC wobj1, p30, p40, v1000, z10, tool0;`,在工作对象wobj1的坐标系中,从p30到p40画弧。
3. **速度控制**: 速度设置通常有限制,比如最高v5000mm/s,手动限速状态下,速度会被限制在250mm/s。转弯区数据用于控制机器人在转角处的运动平滑性。
4. **IO控制指令**:
- **Set**: `Set do1;` 用于将数字输出`do1`置位为1。
- **Reset**: `Reset do1;` 用于将数字输出`do1`复位为0。
- **WaitDI**: `WaitDI di1, eq, 1, 300;` 判断数字输入`di1`是否等于目标值1,如果在300秒内不满足,机器人会报警或执行错误处理。
- **WaitDO**: 类似于`WaitDI`,但针对数字输出`do1`。
- **WaitUntil**: `WaitUntil do1 = 1;` 等待do1的值变为1。
5. **条件逻辑判断指令**:
- **IF...THEN...ELSE...ENDIF**: 用于根据条件执行不同的指令块,如 `IF flag1 THEN do1 := 1; ELSE ... ENDIF;`。
- **FOR循环**: 用于重复执行一段代码,如 `FOR i := 1 TO 10 DO ... ENDFOR;`。
- **WHILE...DO...ENDWHILE**: 当满足特定条件时,持续执行循环,如 `WHILE num1 > num2 DO num1 := num1 - 1; ENDWHILE;`。
6. **例行程序调用**: 使用`ProcCall`指令来调用已定义的例行程序,如 `ProcCall Routine1;`。
在编程时,确保正确选择工具坐标和工件坐标,并根据实际需求调整速度、等待时间和转弯区数据,以实现安全高效的机器人运动。同时,合理利用条件判断和循环结构,可以编写出更加灵活、适应性强的程序。对于IO控制,适时地置位和复位数字信号,以及根据信号状态进行程序流程控制,是确保机器人系统正常运行的关键。