Keywords Flame smoke detection, Target recognition, YOLOvS, Imag
需积分: 0 160 浏览量
2024-04-30
11:45:53
上传
评论
收藏 4.5MB PDF 举报


Flame smoke detection
algorithm based on YOLOv5
in petrochemical plant
Yueting Yang
Guangdong University of Petrochemical Technology, Maoming, China and
Jilin Institute of Chemical Technology, jilin, China, and
Shaolin Hu, Ye Ke and Runguan Zhou
Automation School, Guangdong University of Petrochemical Technology,
Maoming, China
Abstract
Purpose – Fire smoke detection in petrochemical plant can prevent fire and ensure production safety and life
safety. The purpose of this paper is to solve the problem of missed detection and false detection in flame smoke
detection under complex factory background.
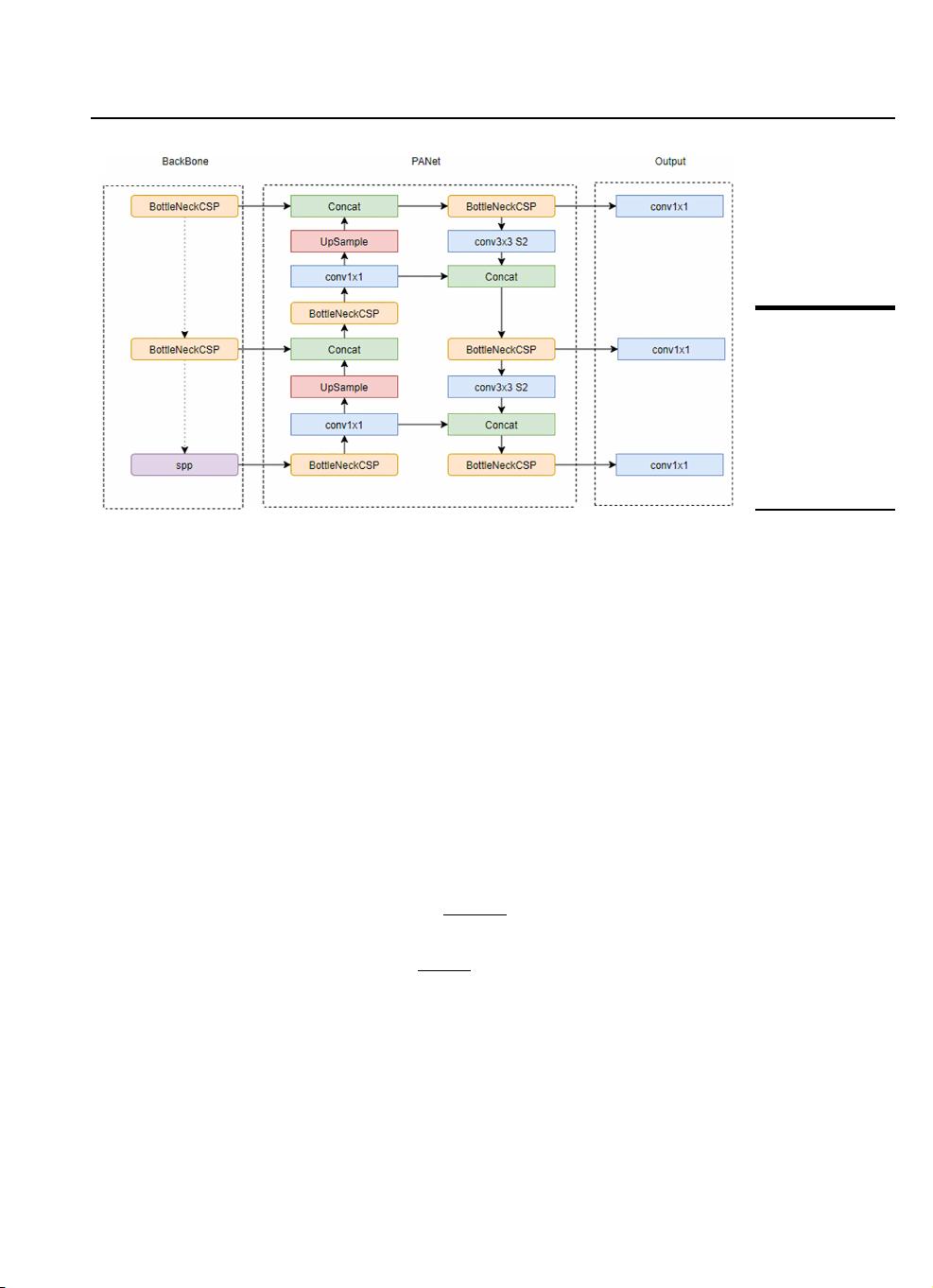
Design/methodology/approach – This paper presents a flame smoke detection algorithm based on
YOLOv5. The target regression loss function (CIoU) is used to improve the missed detection and false detection
in target detection and improve the model detection performance. The improved activation function avoids
gradient disappearance to maintain high real-time performance of the algorithm. Data enhancement
technology is used to enhance the ability of the network to extract features and improve the accuracy of the
model for small target detection.
Findings – Based on the actual situation of flame smoke, the loss function and activation function of YOLOv5
model are improved. Based on the improved YOLOv5 model, a flame smoke detection algorithm with
generalization performance is established. The improved model is compared with SSD and YOLOv4-tiny. The
accuracy of the improved YOLOv5 model can reach 99.5%, which achieves a more accurate detection effect on
flame smoke. The improved network model is superior to the existing methods in running time and accuracy.
Originality/value – Aiming at the actual particularity of flame smoke detection, an improved flame smoke
detection network model based on YOLOv5 is established. The purpose of optimizing the model is achieved by
improving the loss function, and the activation function with stronger nonlinear ability is combined to avoid
over-fitting of the network. This method is helpful to improve the problems of missed detection and false
detection in flame smoke detection and can be further extended to pedestrian target detection and vehicle
running recognition.
Keywords Flame smoke detection, Target recognition, YOLOv5, Image detection, Deep learning
Paper type Research paper
1. Introduction
The production safety of the factory has always been a problem that cannot be ignored. Taking
petrochemical plants as an example, due to the dense production workshops and the existence of
a large number of flammable and explosive dangerous goods, once a fire occurs, it is easy to
induce catastrophic consequences, cause environmental pollution and seriously threaten
production safety and personnel life and property safety. Therefore, timely detection and early
warning control of early fires is a realistic demand for safe production. International and domestic
attention has been paid to the flame smoke detection and alarm technology in the factory area.
Early fire detection is mainly achieved through smoke sensors and temperature sensors. For
example, smoke sensors complete fire prevention by detecting smoke concentration. This method
has a good performance in indoor or some small places. However, in a complex environment, due
to the influence of factors such as airflow environment and thermal barrier effect, coupled with
IJICC
16,3
502
This work was supported by National Natural Science Foundation of China (61973094).
The current issue and full text archive of this journal is available on Emerald Insight at:
https://www.emerald.com/insight/1756-378X.htm
Received 18 November 2022
Revised 8 December 2022
Accepted 2 January 2023
International Journal of Intelligent
Computing and Cybernetics
Vol. 16 No. 3, 2023
pp. 502-519
© Emerald Publishing Limited
1756-378X
DOI 10.1108/IJICC-11-2022-0291


剩余17页未读,继续阅读
资源评论


羁旅少年
- 粉丝: 4719
- 资源: 4









最新资源
- 2c60fbb3dt9ad50ed8864298eea1484b.MP4
- 基于yolov8+dlib实现视觉识别的安全驾驶监测系统部署到jetson NX平台源码+模型.zip
- Qt框架+OpenCV+动态爱心+编程教学+520
- 基于opencv+yolov8实现目标追踪及驻留时长统计源码.zip
- 水稻病害基于Yolov8算法优化目标检测识别与AI辅助决策python源码+模型+使用说明.zip
- 海尔618算价表_七海5.20_16.00xlsx(1)(2).xlsx
- WebCrawler.scr
- 【计算机专业毕业设计】大学生就业信息管理系统设计源码.zip
- YOLO 数据集:8种路面缺陷病害检测【包含划分好的数据集、类别class文件、数据可视化脚本】
- JAVA实现Modbus RTU或Modbus TCPIP案例.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


