基于傅里叶变换的Gamma因子快速自标定方法.docx
版权申诉
98 浏览量
2023-04-30
14:13:30
上传
评论 1
收藏 2.31MB DOCX 举报


摘要
为减少测量系统中由非线性响应引起的相位误差,提出一种基于傅里叶变换的 Gamma 因子
快速自标定方法。首先,对捕获的光栅条纹进行傅里叶变换,将图像由灰度值域转换到频率
值域;其次,在频率值域找到畸变光栅条纹的高次谐波分量与基波分量,通过优化函数在实数
范围内搜索最佳预编码 Gamma 值,使高次谐波分量与基波分量的功率比值最小,完成测量
系统的 Gamma 值自标定,进而有效减小实际测量过程中的相位误差;最后,在标准平面及实
际测量物体上对所提方法进行实验验证,并与经典的相位误差校正算法进行对比。实验结果
表明,所提方法能极大地抑制 Gamma 非线性响应,比已有相位误差校正方法更简单高效,具
有更高的测量精度和测量效率。
Abstract
To reduce the phase error caused by the nonlinear response in the measurement
system, this paper proposed a fast self-calibration method of the Gamma factor based on
the Fourier transform. In this method, Fourier transform of the captured grating fringes
was performed to convert the image from the gray-scale domain to the frequency
domain. Then, the high-order harmonic components and fundamental components of the
distorted grating fringes were found in the frequency domain. The optimal pre-encoded
Gamma value within the real number range was searched by an optimization function to
minimize the power ratio of the high-order harmonic components to the fundamental
components and complete the Gamma value self-calibration of the measurement system,
which thereby effectively reduced the phase error in the actual measurement process.
On standard planes and actual measurement objects, the method in this paper was
verified by experiments and compared with classic phase-error correction algorithms.
Experimental results prove that this method can suppress Gamma nonlinear response to
a great extent. It is simpler and more efficient than existing phase-error correction
methods and improves measurement accuracy and measurement efficiency.
1 引言
传统三维测量方法由于测量过程复杂、计算量大、精度较低,不能满足当前精密测量的需
求。条纹投影相移轮廓术作为结构光投影三维测量的代表性方法,具有高效率、低成本、非
接触、测量范围广等优点,被广泛应用于文物保护、医学诊断、工业检测、虚拟现实等领域
[1-2]
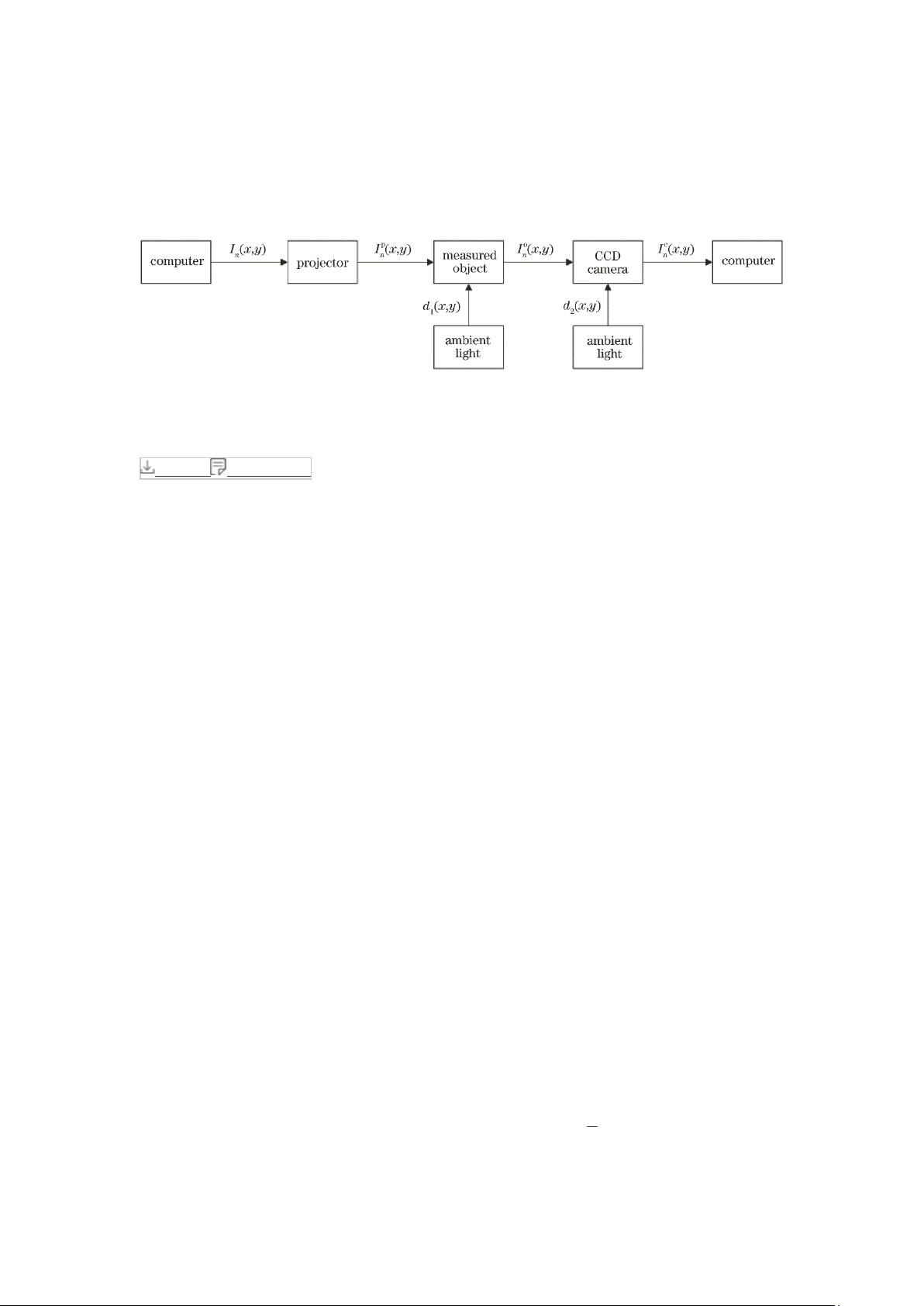
。条纹投影相移轮廓术的基本原理是:首先,利用计算机产生特定结构的光栅条纹图案,经
过数字投影仪投射至被测物体表面;然后,采用 CCD 相机捕获经被测物体表面调制的形变条
纹图像,使用标准 N 步相移算法解得相位主值图配合相位解包裹运算,得到被测物体的绝对


剩余18页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3691
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











