基于垂直双相机的微动平台位姿修正方法研究.docx
版权申诉
72 浏览量
2023-02-23
20:44:20
上传
评论
收藏 1.89MB DOCX 举报


摘要
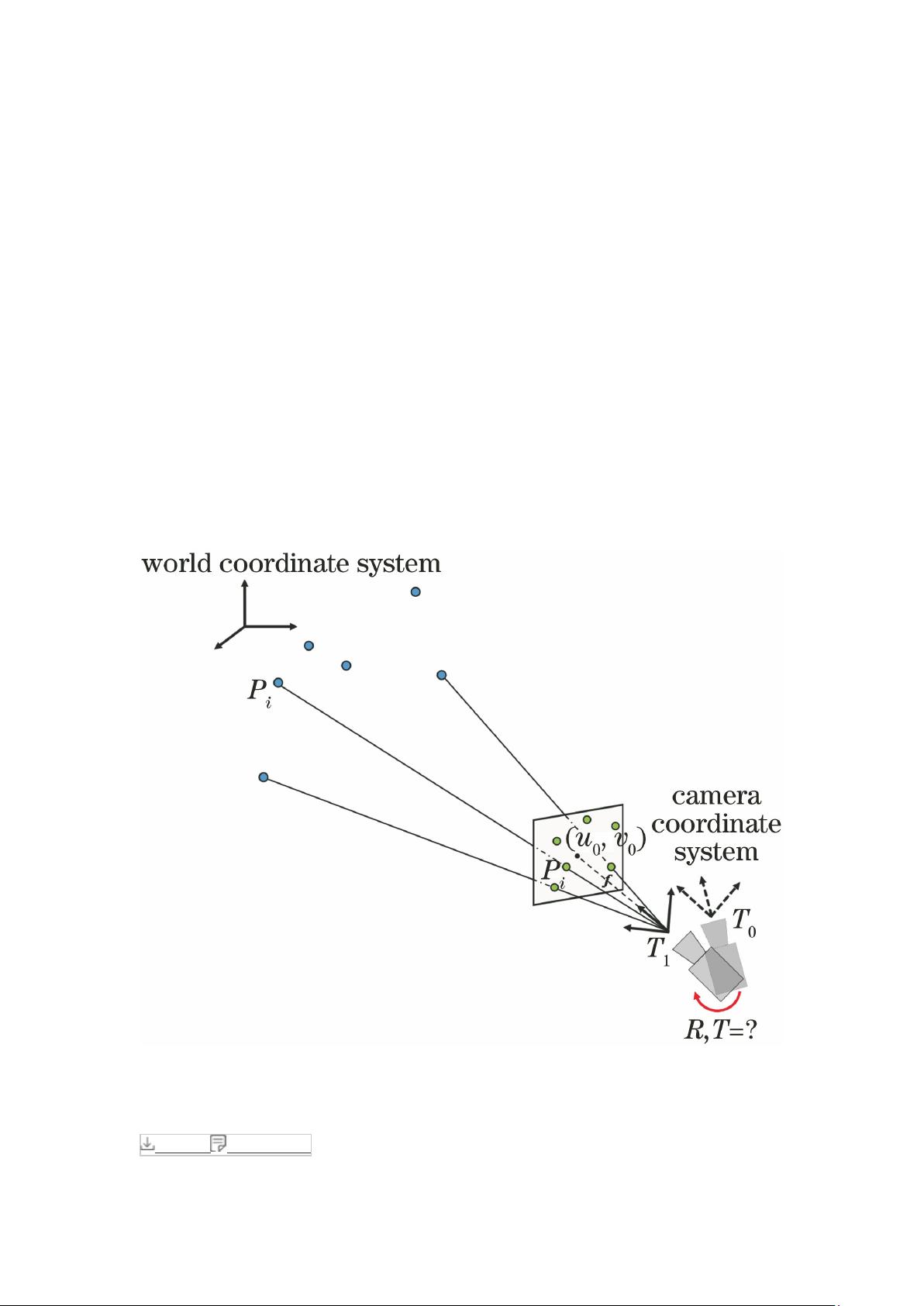
基于视觉的监测系统在野外进行长期工作时,安装了监测系统的平台自身会发生 6-自由度
(6-DOF)的微小晃动,从而给测量结果带来较大的误差。提出了一种线性求解相机微小位姿
变化的方法:通过构造垂直双相机模型,引入垂直固连约束关系,可线性解算出相机 6-DOF 的
微小变化。仿真验证表明:当相机发生三个欧拉角不超过 30',三个平移向量不超过 10 mm
的微小位姿变化时,与典型的基于单目透视 n 点(PnP)的位姿估计算法相比,所提算法在解算
精度、鲁棒性以及运行效率上都具有较大优势;室外实验表明:所提方法与单目 PnP 算法对
比能更优地补偿观测平台自身微小运动引起的测量误差,在 6 个控制点下测量 44 m 处目标
点的沉降量,利用所提方法修正平台位姿变化后绝对测量误差的平均值降至 0.2 mm,验证了
所提方法的有效性和实用性。
Abstract
The observation stage, on which the vision-based monitoring system is installed,
experiences slight 6-degree-of-freedom (6-DOF) shaking when working for a long time.
As a result, it brings great errors to the measurement results. Therefore, a linear solution
method for micro-motion variations of the cameras was proposed. Micro 6-DOF pose
variations of the cameras were then linearly calculated with a newly constructed model of
two orthogonal cameras in fixed connection. Simulation verification shows that when the
three Euler angles of the cameras are less than 30' and the three translation vectors are
less than 10 mm, the proposed method delivers better solution accuracy, robustness,
and computational efficiency than the typical monocular perspective-n-point (PnP) pose
estimation algorithm. Meanwhile, outdoor experiments show that the proposed method
better calibrates the measurement error caused by the micro-motion of the observation
stage. The subsidence of the target point 44 m away from the observation stage was
measured and the result shows that in the case of 6 control points, the average absolute
measurement error after the pose variation of the stage is calibrated decreases to 0.2
mm, which verifies the effectiveness and practicability of the proposed method.
1 引言
基于视觉的位移测量方法通常需要假定相机基座静止不动,但在野外复杂测量任务中,由于
外界环境因素的影响,观测平台固定不动的假设并不成立,导致测量结果不能满足高精度要
求
[1-2]
。尤其当待测目标与观测平台相距较远时,即使平台仅发生微小晃动也会给测量结果引
入较大误差,因此有必要对平台自身的 6-自由度(6-DOF)微小变化进行完整的高精度解算并
消除平台晃动造成的影响,才能保证位移测量结果的有效性和准确性。

剩余14页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3577
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











