基于事件相机的定位与建图算法 综述.docx
版权申诉
21 浏览量
2023-02-23
20:19:40
上传
评论
收藏 1.48MB DOCX 举报


感知自身在空间中的位置、方向、速度以及周围环境信息, 是自动驾驶系统、移动机
器人等无人系统进行自主导航、路径规划
[1]
等任务的前提. 因此, 同时定位与建图
(Simultaneous localization and mapping, SLAM)技术
[2]
被广泛应用于自动驾驶、移动机器人、
无人机、增强现实
[3]
等领域. 在 SLAM 算法中常用的传感器包括全球导航卫星系统(Global
navigation satellite system, GNSS)、惯性导航系统(Inertial navigation system, INS)、激光雷达
(Light detection and ranging, Lidar)、毫米波雷达(Radio detection and ranging, Radar)、相机等.
相较于其他传感器, 相机具有体积小、成本低、易部署、低功耗、能够提供丰富的信息等
优点; 但由于其视野受限、容易受光照影响, 同时无法直接获得深度信息, 基于视觉的定位
与建图
[4-6]
方法比其他传感器的方法更复杂. 因此, 视觉 SLAM 一直是 SLAM 领域里备受关
注的研究方向.
单目相机无法获得深度信息, 这不仅使单目 SLAM 算法更复杂, 而且导致通过单目
SLAM 算法得到的相机位姿和地图具有尺度不确定性. 而利用多个相机之间的内参
(Intrinsic)和外参(Extrinsic), 则可以将多个相机组成双目或多目相机系统; 然后, 根据多目
相机系统对同一点的组合观测, 再利用三角测量的原理便可以计算出该点的深度. 早在
2003 年, Olson 等
[7]
便使用这种方法进行相机的位姿估计. 然而由于计算量较大, 三角测量
通常只能针对稀疏的特征点; 对所有像素进行三角测量和深度恢复, 需要有额外的设备和算
法来支持. 随着传感器技术的发展, 以微软的 Kinect
[8]
为代表的 RGB-D 相机可以通过红外
结构光或飞行时间法(Time of flight, TOF)来直接获取场景中的三维信息, 使得 RGB-D 相机
成为视觉 SLAM 中代替双目相机的可选方案
[9]
. 除此之外, 一些研究者结合相机和 IMU 两
种传感器来构建视觉−惯性系统(Visual-inertial system, VIS)
[10-11]
, 利用视觉信息修正 IMU 的
累积误差, 同时利用 IMU 提供的线加速度和角速度获得相机的绝对位姿, 为视觉里程计提
供良好的位姿初值, 并且可以为图像进行运动矫正. 视觉 SLAM 技术发展至今, 领域内已经
有许多经典的算法, 其中基于纯视觉的代表性算法有 PTAM
[12]
、ORB-SLAM
[13-14]
、
SVO
[15]
、LSD-SLAM
[16-17]
等, 基于视觉−惯性系统的代表性工作有 MSCKF
[18]
、OKVIS
[19]
以
及香港科技大学研发的 VINS
[20]
等.
尽管相机凭借其自身的优势, 在 SLAM 领域中被广泛地应用, 但是传统的 CMOS
[21]
相
机(Active pixel sensor, APS)存在着不少缺陷: 每个像素需要统一时间曝光, 快速运动时图像
容易产生运动模糊; 相机获取信息的频率受曝光时间的限制; 在高动态范围(High dynamic
range, HDR)的场景下容易出现图像部分过曝或部分欠曝的现象, 导致场景细节丢失. 这些
缺陷的存在限制了视觉 SLAM 的使用场景, 因此一类新型的基于事件的动态视觉相机进入
了 SLAM 研究者们的视野. 基于事件的相机(简称事件相机)是一类异步(Asynchronous)的相
机
[22]
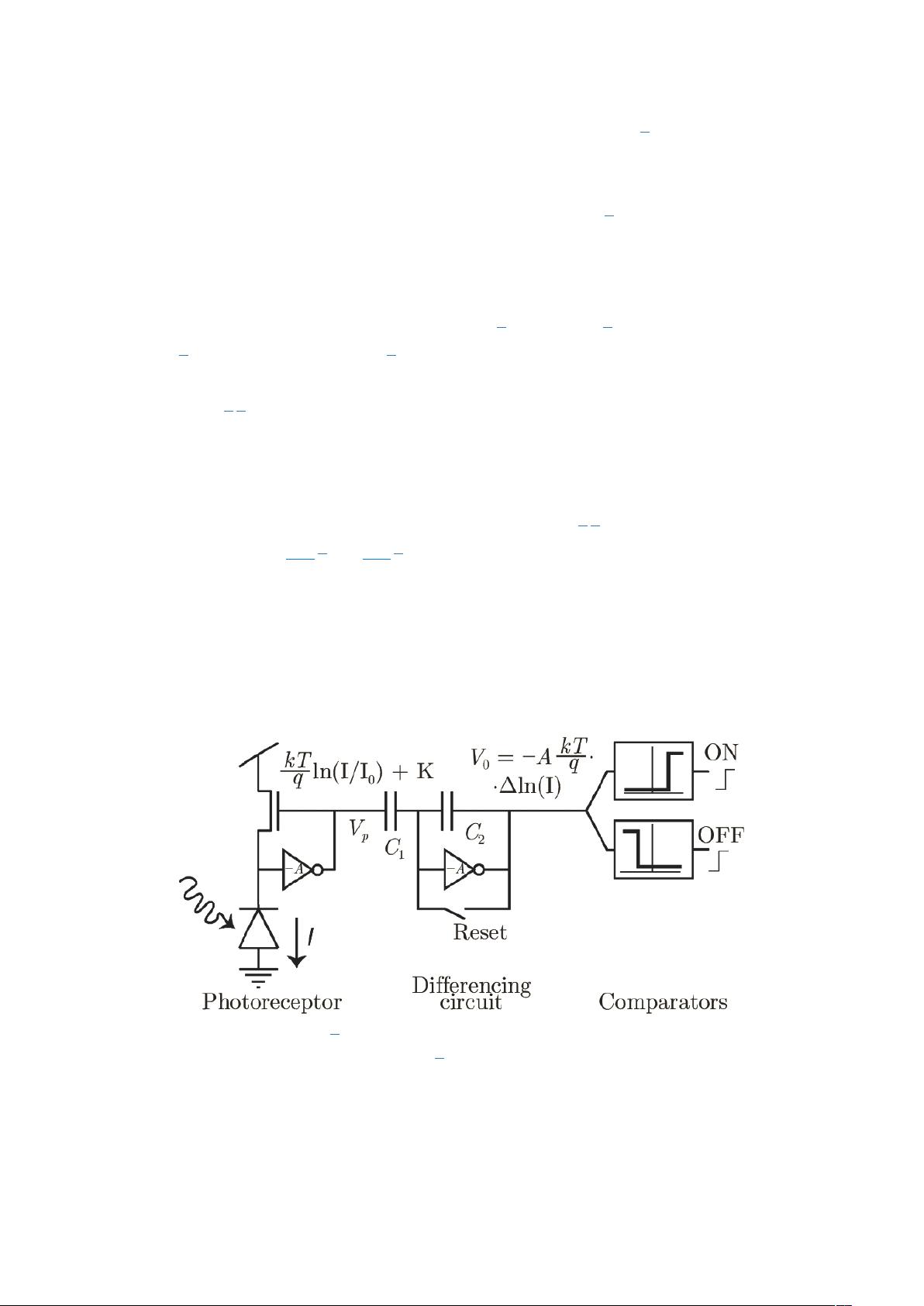
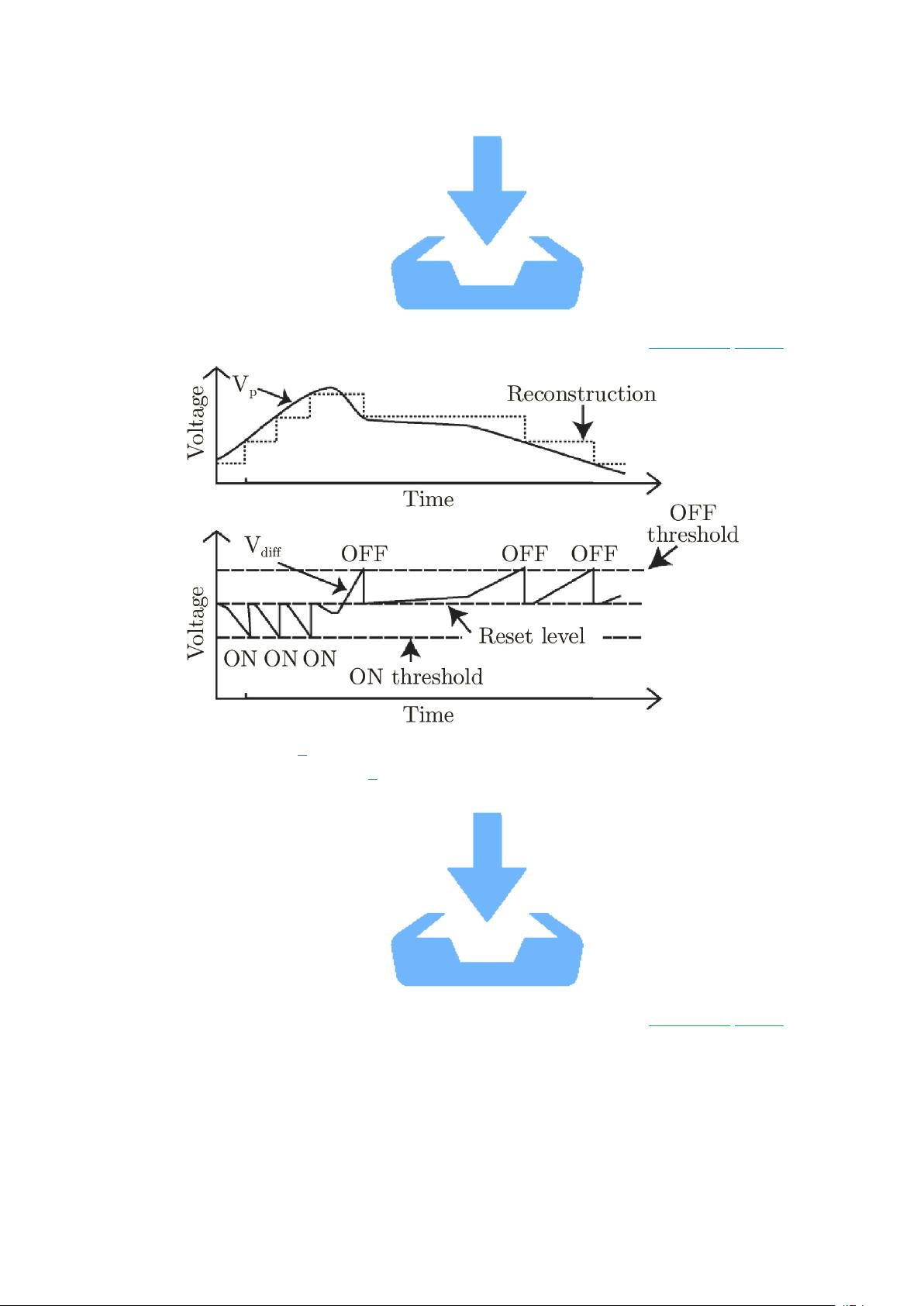
, 它的诞生是受到了生物视网膜的启发. 事件相机不再像传统的相机那样需要外部信号
来触发像素统一曝光而获得完整的图像, 而是每个像素单独检测相对光照变化, 并输出光照
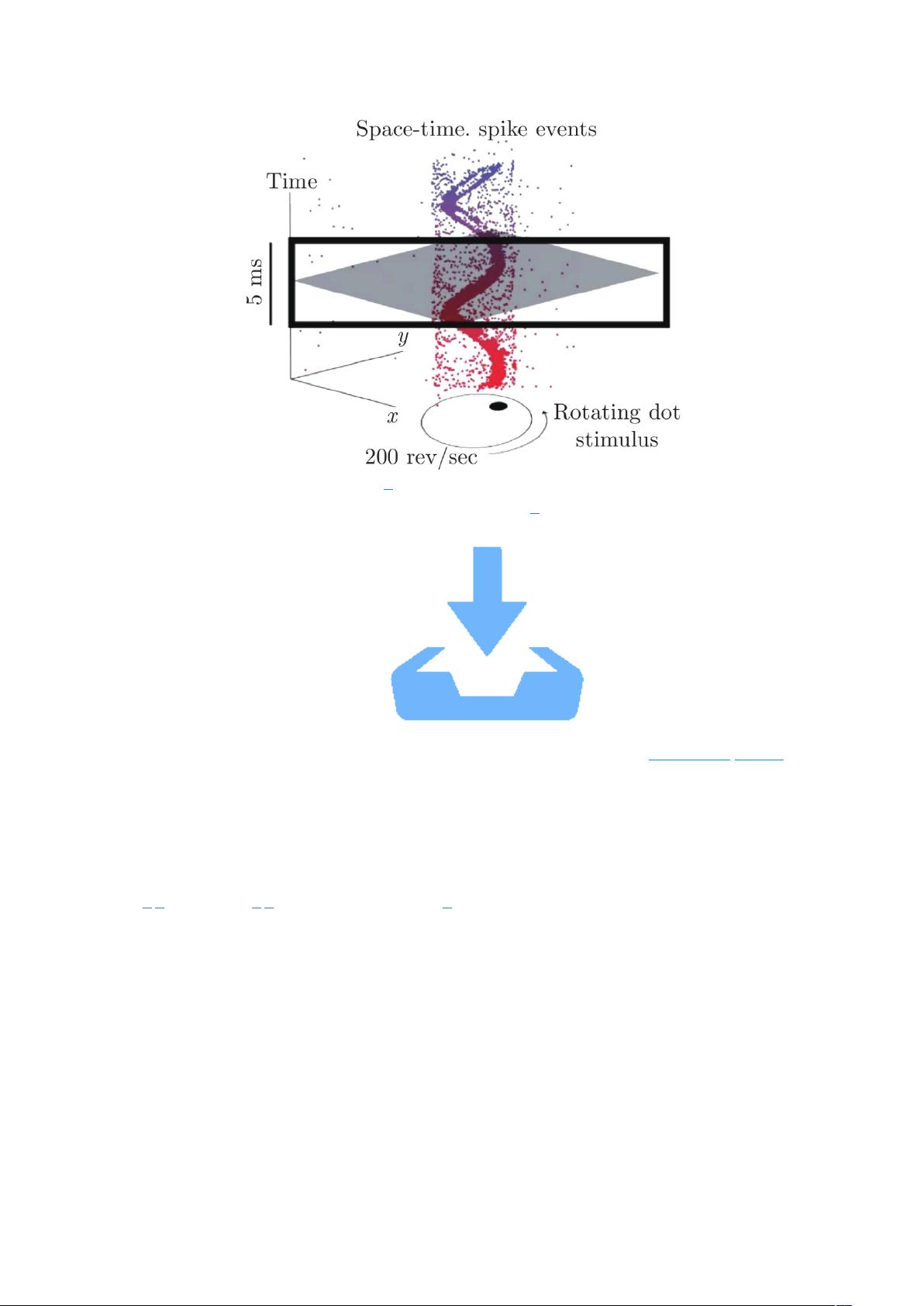
变化的像素地址−事件(Address-event, AE)流. 图 1
[47]
为带一个黑色圆点的匀速旋转圆盘在事
件相机中产生地址−事件流的示意图. 其中 X、Y 轴张成像素地址空间, 不同时刻被激发的
像素点在时空上形成一条螺旋线.
剩余15页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3663
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











