考虑能耗节约的集装箱码头双小车岸桥与AGV联合配置及调度优化.docx
版权申诉
154 浏览量
2023-02-23
20:18:07
上传
评论
收藏 1.85MB DOCX 举报


集装箱船大型化发展对集装箱码头前沿作业提出了更高的要求, 一方面要求提高码头
装卸效率和服务水平, 另一方面要求降低成本并减少能耗, 推动集装箱码头绿色低碳发展.
以人工操作为主体的集装箱码头因不能及时准确地获知装卸全过程信息, 导致生产效率降
低和能耗增加
[1]
. 为了提高码头装卸效率和服务水平, 早在 1993 年, 荷兰鹿特丹港就开始建
设运营自动化集装箱码头, 接着伦敦港、川崎港、新加坡港、汉堡港、厦门远海、上海洋
山港等港口相继建成自动化集装箱码头. 经过二十多年的发展, 目前自动化码头技术已经逐
渐成熟和完善, 特别是为了适应节能环保要求, 已将早期使用的内燃机驱动的设备转换为电
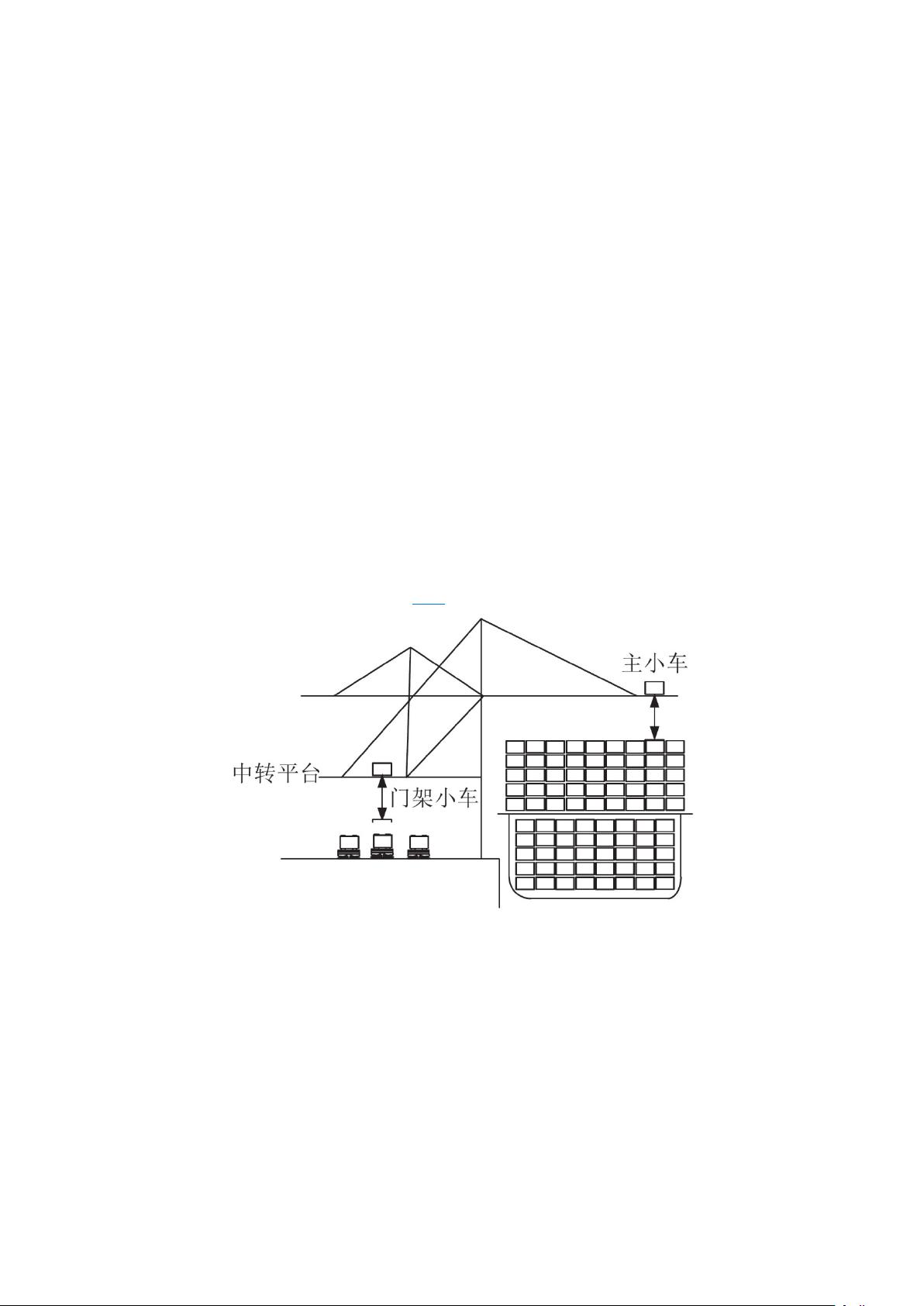
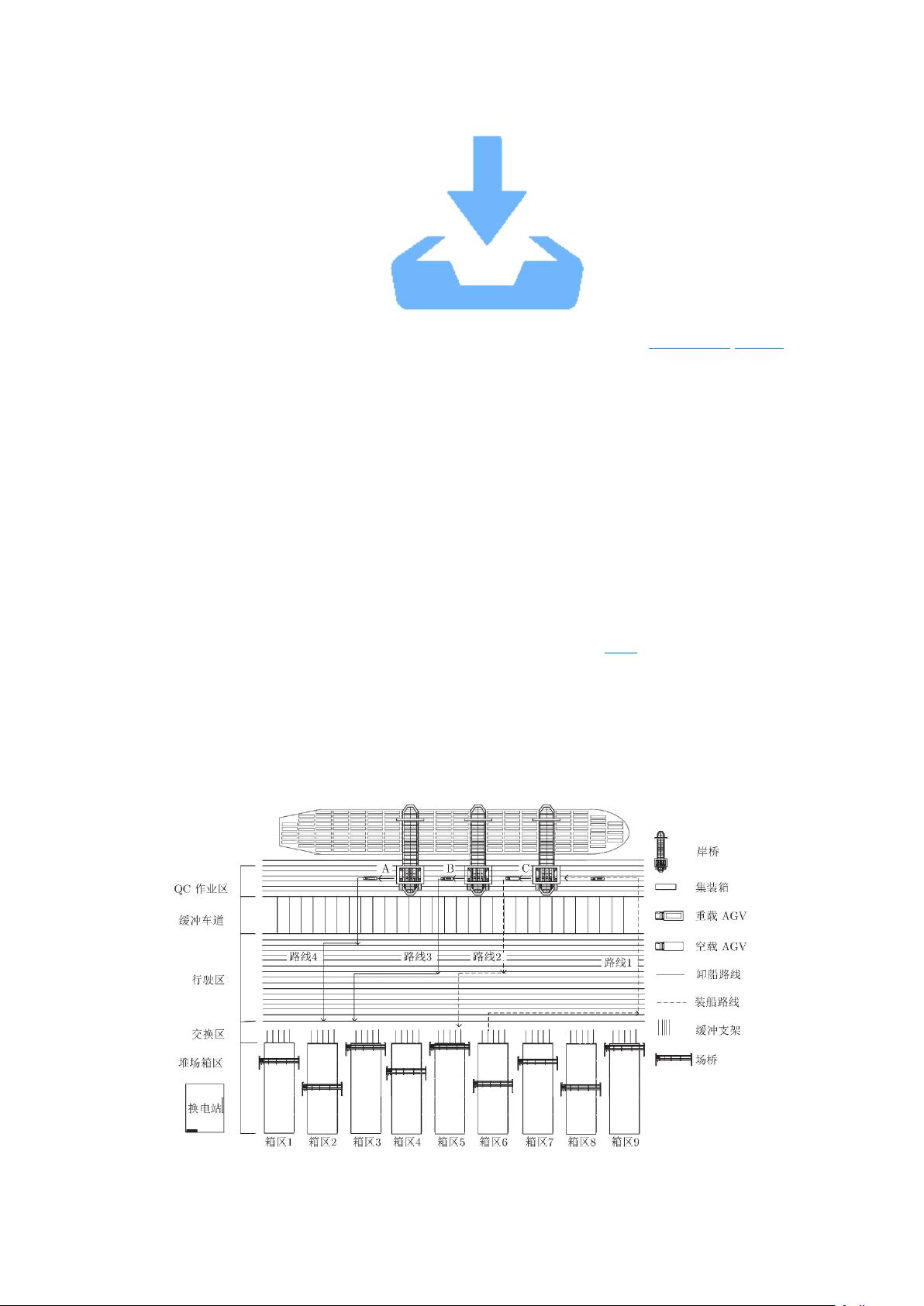
力驱动, 岸边作业采用双小车岸桥进行船舶装卸作业, 水平运输采用自动导引车(Automated
guided vehicle, AGV), 堆场使用自动化轨道吊(Automated rail mounted gantry crane,
ARMG),“双小车岸桥+AGV+ARMG”的装卸工艺系统被应用于大多数自动化集装箱码头.
Sim
[2]
指出码头装卸作业的能耗在码头作业总能耗中占比 48.3 %, 联合优化双小车岸桥与
AGV 的配置及调度以减少码头装卸作业的能耗, 对集装箱码头实现绿色低碳发展有重要意
义.
已有学者对集装箱码头装卸作业能耗、岸桥和 AGV 的配置和调度等问题展开了研究.
郑松等
[3]
将码头系统的管理和控制过程通过平行系统融合在一起, 以实现对港机设备的最优
控制. He 等
[4]
指出岸桥和 AGV 的配置和调度是装卸作业过程中两个密切相连的生产决策问
题, 岸桥的配置和调度决定船舶作业时间, AGV 的配置和调度影响岸桥和 ARMG 的取/放箱
时间, 联合优化装卸设备的配置和调度, 降低自动化集装箱码头装卸作业过程中的能耗成为
研究热点问题. 岸桥把待卸船集装箱从船上提起放到运输工具上, 又把待装船集装箱放到船
上, 是码头装卸作业中重要的一环, 关于减少岸桥作业中能耗的问题, 部分学者从资源配置
的角度出发, 研究码头现有泊位和岸桥的分配方案. 例如, Chang 等
[5]
研究了一种泊位岸桥调
度策略, 并通过实例分析验证了策略的有效性和可靠性. He
[6]
以最小化船舶延误和最小化作
业能耗为目标, 构建了泊位分配和岸桥分配问题混合整数优化模型, 并基于集成仿真的优化
方法探索解空间.
在已知泊位计划下优化岸桥在港口所有船舶之间调度以实现装卸船时间最短的研究方
面, Chang 等
[7]
研究了动态船舶到达条件下岸桥调度问题, 提出一种基于动态滚动策略的岸
桥调度方法, 建立了以最小化港口所有船舶的装卸作业时间和均衡岸桥作业时间为目标的
优化模型, 采用遗传算法求解, 得到各个船上集装箱任务的最佳装卸顺序和完成时间.
Zhang 等
[8]
考虑了装卸过程中船舶的纵向稳定性, 建立了具有稳定性约束的岸桥调度优化模
型, 引入了一种基于滑动窗的启发式算法以修复违反稳定性约束的岸桥调度序列, 并将模型
求解结果与不考虑船舶稳定性的结果进行了比较和分析, 验证了模型和算法的有效性.
部分学者从优化每个集装箱装卸作业时间的角度出发, 研究了岸桥调度对减少装卸能
耗和装卸完工时间的作用. Liu 等
[9]
研究了单船岸桥分配和调度问题, 以最小化卸载过程中
二氧化碳排放量为目标建立了 AGV 排队模型. Liang 等
[10]
从岸桥任务调度和数量配置两个
方面研究了岸桥调度问题, 通过分析每个任务的最早可作业时刻和要求完工时刻, 建立了岸
桥调度和配置的耦合模型, 并应用循环迭代的方法求解每个时间窗内岸桥配置和调度方案.
Msakni 等
[11]
针对码头岸桥调度问题, 以单个集装箱为任务单位, 提出了增加割平面和基于


剩余27页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3541
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











