平行矿山 从数字孪生到矿山智能.docx
版权申诉
116 浏览量
2023-02-23
20:18:19
上传
评论
收藏 1.81MB DOCX 举报


矿石是我国重要的战略资源, 对国家的工业化和现代化起着至关重要的作用. 我国丰
富的矿藏为国民经济的发展做出了不可磨灭的贡献
[1]
. 目前已探明煤炭资源储量为 17085.73
亿吨, 占据所有探明化石资源储量的 99.12%, 煤炭的资源潜力为 38800 亿吨, 占据化石资
源潜力的 91.42%. 我国煤炭主要分布在华北地区和西北地区如山西、内蒙古、陕西和新疆
等. 有数据显示, 煤炭远景储量集中在新疆等地. 近些年国家对煤炭需求增长率减少, 但煤
炭依然是最稳定的化石能源, 且长期是化石能源消耗中的主要构成部分, 我国预计在 2030
年达到二氧化碳排放量峰值, 彼时化石能源占比 75%左右, 其中煤炭能源占比 50%以上. 因
此我国“十四五”期间提出“碳达峰” 和“碳中和” 两项工作重点, 要求绿色化智能化达到排放
峰值, 并在 2060 年前实现二氧化碳零排放. 所以如何将煤炭开采智能化、生态化成为当前
煤矿行业的重中之重.
国外的露天智能采矿技术发展较早且趋于成熟, 如瑞典山特维克矿山工程机械集团在
上世纪研制的 EDC 系统, 当钻机司机的作业超出设定范围时, 系统会向操作者报警; 美国
卡特彼勒公司应用现代计算机技术更新了原自动化系统, 推出了矿山之星系统
(MineStarTM)和钻孔可编程控制系统(HolePro), 通过制导技术, MineStarTM 系统的钻机地
形套件能够适时并精确地管理矿山作业系统中的钻孔作业, 使得管理信息应用于整个采矿
生产中.
相比于世界发达国家, 我国智能化矿山建设工作起步较晚. 我国露天煤炭开采行业经
历了人工炮采、普通机械化开采、综合机械化开采和智能化开采四个阶段. 在上世纪 60 年
代之前主要是人工炮采阶段, 上世纪 60 年代后采用普通机械化开采, 到上世纪 80 年代逐渐
替换为由挖掘机货车等重型机械完成露天矿山开采, 由此进入综合机械化开采阶段. 随后我
国开始矿区的信息化建设, 2000 年左右首次实现煤炭行业输送带、泵水站等系统的自动化
控制, 露天矿山开采进入信息化阶段, 矿山开采效率大幅度提升
[2]
. 2010 年左右, 物联网技
术的兴起使得大数据, 人工智能等技术逐步与煤炭行业耦合在一起, 矿区开采逐步实现自动
爆破、矿山挖卡协同、无人运输等功能, 最终进入智能化阶段.
近几年, 随着国家政策的布局与引导, 大数据、人工智能以及 5G 技术的发展, 国内矿
山在智能化方面取得了显著进展. 2018 年 1 月, 由中国科学院孵化的青岛慧拓智能机器有限
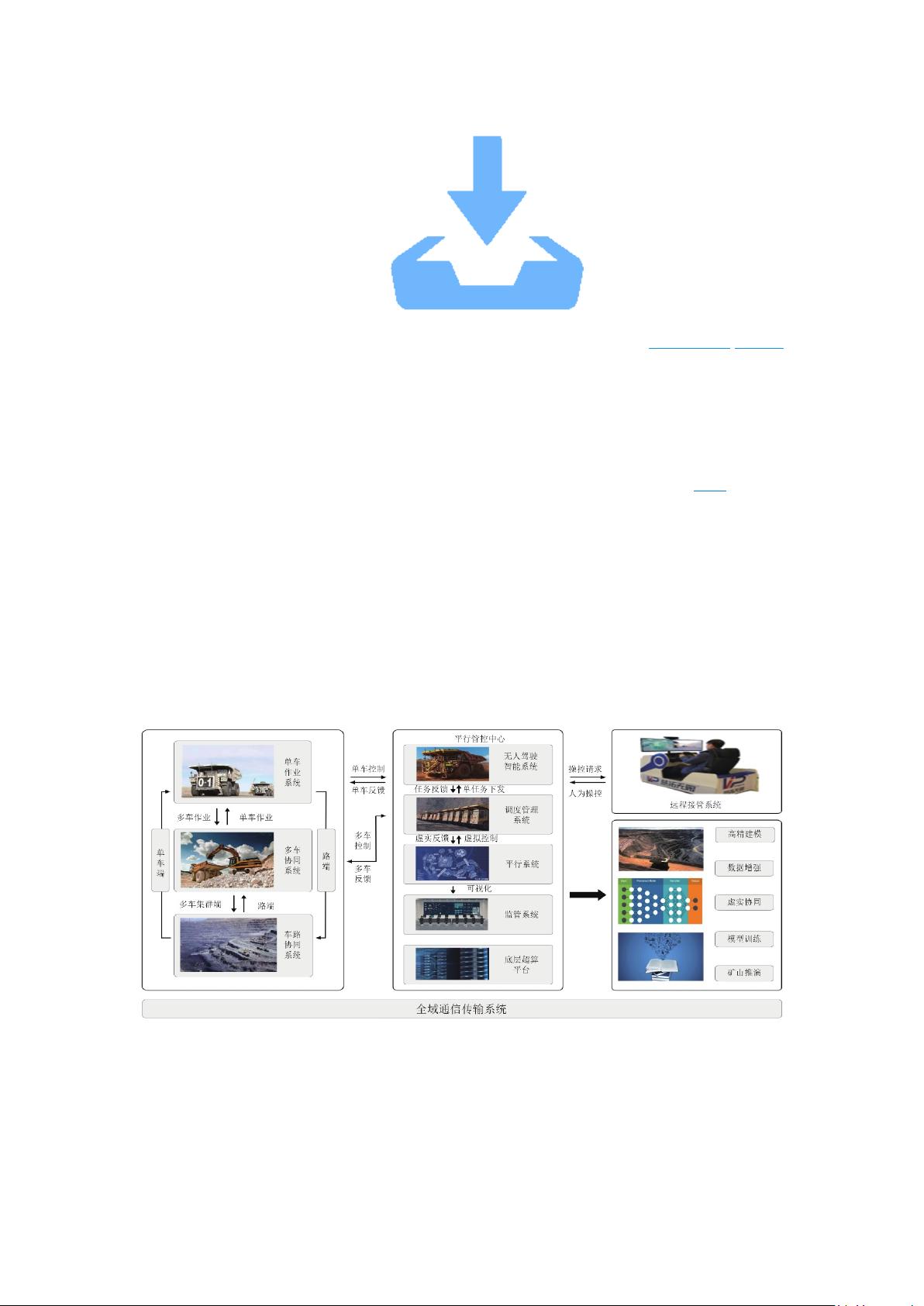
公司发布“愚公”平行矿山系统, 该系统由六大核心子系统构成. 这是国内首家自主研发提出
的矿山无人化整体解决方案, 该方案可同时适用于井工矿与露天矿场景. 截止 2021 年 1 月,
慧拓研发的“愚公”系统已经在 20 多个矿区落地. 2019 年 5 月, 慧拓与中煤平朔集团合作建
立了国内首家智慧矿山测试示范基地. 基地通过验证、测试相关无人驾驶设备理论与技术,
推动智慧矿山相关技术走向工业级应用, 保障经过严格标准验证的产品可规模化的部署于
智慧矿山, 为智慧矿山无人化行业标准及国家标准的确立提供有力支撑. 2020 年 4 月, 慧拓
与华能伊敏合作的无人矿山项目充分发挥伊敏露天矿“煤电一体化”生产优势, 全力开展智
能矿山建设工作, 打造复杂气候地区全天候无人驾驶项目; 联合慧拓在电气化、自动驾驶、
智能调度、感知定位、高精度地图等领域进行技术合作, 该无人驾驶项目已经具备全天候
环境作业能力, 最终将实现矿区的安全、绿色、高效开采. 2020 年 6 月, 慧拓联合紫金矿业
在条件极其恶劣的青海果洛矿区开展作业, 通过提供纯电动无人宽体车无人驾驶系统, 已实


剩余16页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3658
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











