基于leg-by-leg机动的两级采样被动跟踪方法.docx
版权申诉
175 浏览量
2023-02-23
20:04:32
上传
评论
收藏 811KB DOCX 举报


1. 引言
目标被动跟踪又称目标运动分析(Target Motion Analysis,TMA),指利用被动观测的信
息对目标运动状态在时间上进行连续估计的过程。线谱信号的方位和频率是被动声呐观测
的重要参数,利用低频分析与记录(Low frequency analysis recording,Lofar)谱的方位-频率
TMA
[1,2]
对于水下态势感知具有重要意义。检测前跟踪(Track-Before-Detecting, TBD)技术不
对单帧数据做门限处理,利用多帧数据积累能量进行检测判决,可提高目标的发现概率。
基于粒子滤波的 TBD 方法
[3,4]
通过引入目标运动模型和传感器观测模型,完整地体现了跟
踪的思想,是当前弱目标 TBD 的研究热点。
但是,粒子滤波 TBD 算法在方位-频率观测情况下的应用尚存在障碍。同时观测方位
和频率时目标状态向量维数较高,而粒子滤波 TBD 算法在高维状态空间的采样效率较低
[5-
7]
,为满足一定的检测和估计要求,算法所需的粒子数量随采样维数呈指数级增长
[8]
,带来
的计算量和存储量都是灾难性的。
文献[9]根据状态向量中各分量对量测有无直接影响,把粒子的高维状态采样转换为两
个低维采样,缺陷是在第 1 级仅对位置和强度采样,目标位置发生变化时无法沿目标轨迹
累积能量,未能体现 TBD 算法“时间换信噪比”的思想。文献[10]认为对量测有直接影响的
状态向量分量的估计会较早接近真值,根据状态向量是否可测分别从后验状态分布和先验
分布中采样,提出局部搜索采样的方法以提高粒子采样效率。Rao-Blackwellized 粒子滤波
[11]
将粒子状态变量划分为线性状态变量和非线性状态变量,通过 Kalman 滤波方法估计线
性状态变量,通过粒子滤波估计非线性状态变量,实现粒子滤波状态向量降维。标准的
Rao-Blackwellized 粒子滤波实现中要求对每个粒子运行一个 Kalman 滤波,虽然状态向量
降维减少了所需的粒子数,但计算量的减少并不显著
[12]
。文献[13]在高维状态空间假设下
比较了粒子滤波、马尔可夫蒙特卡罗粒子滤波、混合粒子滤波 3 种算法的性能,但没有给
出提升算法性能的方法。一些学者尝试从粒子滤波原理入手,通过数值逼近等方法解决高
维采样问题
[14,15]
,理论较为复杂且无法直接应用于目标跟踪的场景。
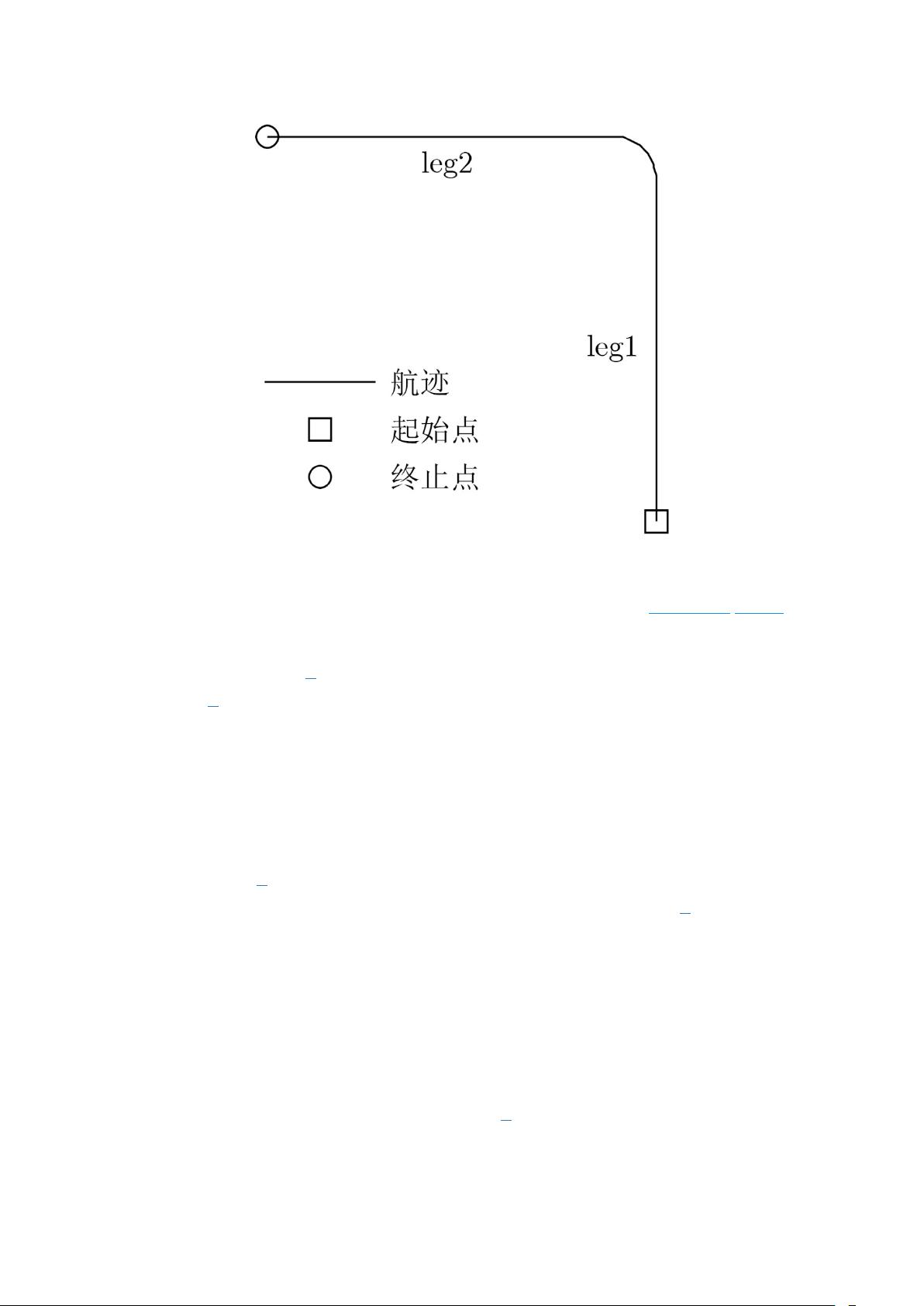
leg-by-leg 机动
[16,17]
是一种易于实施的机动模式,适用于船艇等机动性欠佳的观测载
体。本文针对观测站 leg-by-leg 机动模式下利用方位-频率信息的粒子滤波检测前跟踪算
法,一方面利用 leg-by-leg 机动可观测性特点,在前、后直行段分别建立极坐标系和直角
坐标系下的目标状态模型,提出将极坐标系下的目标状态向量映射至直角坐标系的方法,
通过两级采样将一个高维采样问题变为两个低维采样问题,从而改善粒子的采样效率;另
一方面根据粒子的空间分布特征,自适应地调整过程噪声协方差矩阵,从而改善滤波的收
敛性,避免陷入局部最优。仿真结果表明,所提方法可以有效地增大滤波收敛率、减小目


剩余16页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3654
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 基于Pytorch训练CIRAR10上分类算法.zip
- Pytorch-pytorch深度学习教程之Tensorboard.zip
- 基于C++和Python开发yolov8-face作为人脸检测器dlib作为人脸识别器的人脸考勤系统源码+项目说明.zip
- Pytorch-pytorch深度学习教程之变分自动编码器.zip
- Pytorch-pytorch深度学习教程之神经风格迁移.zip
- Pytorch-pytorch深度学习教程之深度残差网络.zip
- Pytorch-pytorch深度学习教程之循环神经网络.zip
- Pytorch-pytorch深度学习教程之逻辑回归.zip
- Pytorch-pytorch深度学习教程之双向循环网络.zip
- Pytorch-pytorch深度学习教程之卷积神经网络.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


