基于分布式神经动态优化的综合能源系统多目标优化调度.docx
版权申诉
177 浏览量
2023-02-23
16:49:28
上传
评论
收藏 1.53MB DOCX 举报


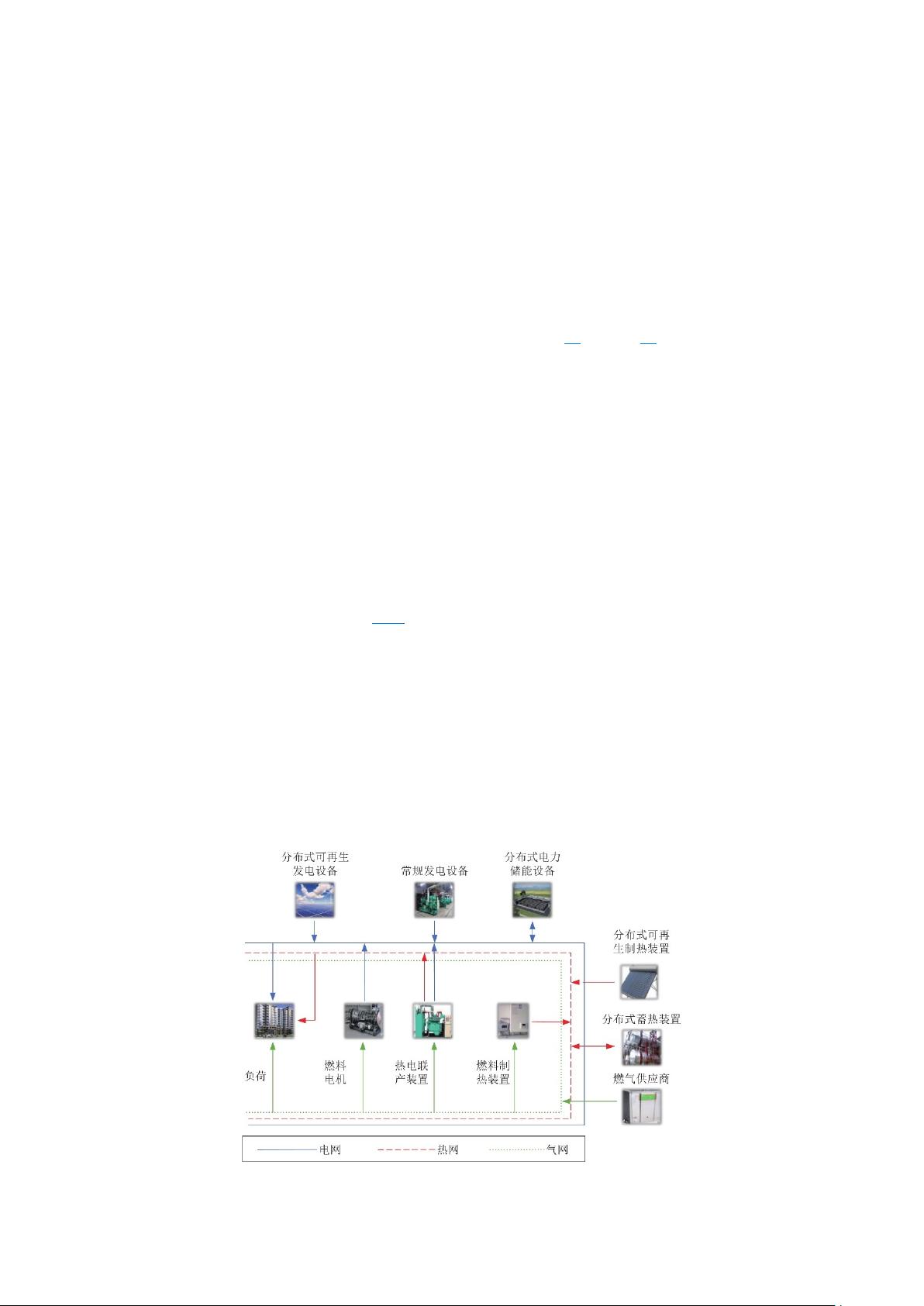
随着全球能源危机的加剧, 包含太阳能、风能等新能源, 并整合了电、气、热等多元
产、用能源形式的综合能源系统, 凭借其节能、环保和灵活等特点受到了世界各国的广泛
关注. 近年来, 国内外学者针对有关综合能源系统的各种关键理论与工程技术, 如优化调度
[1]
、发电预测
[2]
、协同控制
[3]
等, 开展了大量的科学研究和理论分析工作并得到了丰硕的研
究成果.
与已有电、气、热等单一供能系统一样, 在综合能源系统的运行过程中, 如何实现其
优化调度是人们最为关注的问题之一, 即如何在满足各机组单元运行约束的前提下, 通过优
化分配负荷需求并合理安排产能计划实现系统运行总成本(经济成本、环境成本等)最低
[4]
.
近年来, 针对综合能源系统的优化调度问题, 国内外科研学者提出了许多成熟的解决办法,
其总体上可以分为两类, 即集中式方法和分布式方法. 其中, 集中式方法主要包括解析式算
法和启发式算法, 如迭代法、牛顿法和遗传算法等. 1)解析式算法, 如: 文献[5]提出了一种
混合整数优化方法解决具有多不确定性的综合能源系统调度问题; 2)启发式算法, 如: 文献
[6]提出了一种基于直接搜索方法(Direct search method, DSM)的解决综合能源系统经济调度
问题的新方法, 该算法可以处理发电机的非线性特性所带来的问题. 集中式算法在获得最优
解方面具有一定优势, 但存在单点故障敏感、通信负担较大和隐私泄露等缺点. 较之于集中
式方法, 分布式方法可以利用稀疏的通信网络结构实现网络内各组件的分散式协作, 可有效
提高系统的鲁棒性和灵活性, 并兼具保护隐私等优点. 因此, 近年来基于分布式方法研究综
合能源系统的优化调度问题, 已经成为国内外学术界的研究热点. 文献[7]提出了一种智能
能源枢纽的分布式综合需求响应算法, 但它需要一个中央价格协调器和一个集中的通信网
络来更新当地的能源需求信息, 因而认为该算法是一种非完全分布式的方法; 文献[8]针对
多能源系统的优化调度问题提出了一种基于一致性的分布式方法; 文献[9]提出了一种针对
多能源需求的两层分布式优化策略, 以优化生产者的利润和用户的舒适度. 然而, 文献[8]和
文献[9]仅考虑了全局等式和局部不等式约束, 没有讨论电力线路传输约束等耦合约束; 文
献[10]提出了一种综合能源系统经济运行的分布式优化方法, 以适应间歇性可再生能源发
电. 但是它无法解决全局耦合的不可分离不等式约束, 所以没有考虑电网传输损耗等因素的
影响. 值得指出的是, 已有的研究成果大部分都是只考虑系统运行经济性的综合能源系统单
目标分布式优化调度方法, 而在兼顾系统经济性与环境友好性的多目标分布式优化调度策
略的研究尚较为不足. 近期, 在多目标分布式优化理论研究方面, 文献[11]中提出了一种基
于次梯度的多目标分布式优化算法, 并讨论了权重向量的选择与帕累托前沿(Pareto front)近
似误差之间的关系. 但是基于次梯度的方法需要减小步长才能得到精确的解, 这可能会限制
算法的性能. 文献[12]和文献[13]分别提出了基于迭代增广拉格朗日协调技术和扩散策略的
多目标分布式优化算法, 但是其算法处理的约束为等式约束和线性的不等式约束, 无法处理
更具一般性的约束. 针对一类带有一般性约束的非线性优化问题, 文献[14]提出了一种基于
切换拓扑的多目标分布式神经动态优化方法. 该方法可以有效处理更为一般的约束, 且较之
于现有多目标分布式优化方法具有可并行计算、收敛速度快和易于硬件实现的优点. 但是
该算法在权向量的选取上采用了人为选定方式, 因而无法覆盖整个权向量空间, 且要求目标
问题为凸优化问题. 然而, 综合能源系统的多目标优化调度问题具有耦合性强和约束一般性


剩余29页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3652
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











