

0. 引 言
激光三维重建技术是一种主动式光学测量技术,对比声呐扫描,激光扫描不易受到海
水温度和盐度变化的影响,而且高亮度的激光可以有效地滤出背景光的噪声,得到高于声
呐图像像素数百倍的高分辨率的图像
[1-4]
,在水下工程建设、军事需求、科学研究、生物考
察、考古学、海底形貌描绘等方面都具有广泛的应用前景
[5-8]
。水下工程建设方面
[9]
,激光
三维重建技术能为水下施工项目提供更精确的可视化三维现场勘测,用于海底仪器结构的
检查、水下管道磨损排查;军事应用方面
[10]
,可以利用激光三维重建技术对水下目标进行
监视、扫描探测及记录,对水下军事救援工作提供实时数据支持;海洋科研方面
[11-12]
,可
利用水下视觉探测技术完成海底资源探查
[13]
、绘制海底形貌等
[14]
。
德国 Julius-Maximilians-University 大学 Michael Bleier 等人研制了波长为 525 nm 的激
光扫描系统对水箱内的物体进行静态和动态移动扫描。由得到的点云数据可知,两种状态
系统系统的重建误差均小于 5 cm
[15]
。加州大学斯克里普斯海洋学研究所的 Jules S. Jaffe 等
人发明了应用于水下机器人的线激光扫描成像系统,通过使用大型相机分光、扫描或脉冲
系统有效减少后向散射和体积散射。中国海洋大学杨宇等人
[16]
研究了基于多通道 RGB 的
激光扫描系统,提出了一种以三基色激光器为主动光源的高分辨率水下真彩色三维重建方
法,可以对物体包括人脸,进行毫米量级的扫描和重建的同时还原出目标的真实彩色纹理
信息。华北水利水电大学徐望博等人
[17]
设计并实现了基于多线结构光的水下物体测量系
统,在测量距离为 2.45 m 时,平均误差达到 1.6443 mm,具有较高的测量精度。目前许多
研究机构针对于图像、点云的处理以及水体散射的校正方面已经做了大量的工作,得到了
很好的实验效果。但在水下实验过程中,由于防水装置引起的折射作用对视角误差及成像
质量的影响仍需受到更多的关注。
针对于水下目标的高精度三维重建及系统防水装置的折射校正问题,文中设计并研制
了基于旋转扫描的水下高精度三维重建系统,提出了防水装置的折射校正算法。并利用已
知尺寸的标准球对系统进行误差分析,验证系统的可行性及折射校正算法的有效性。
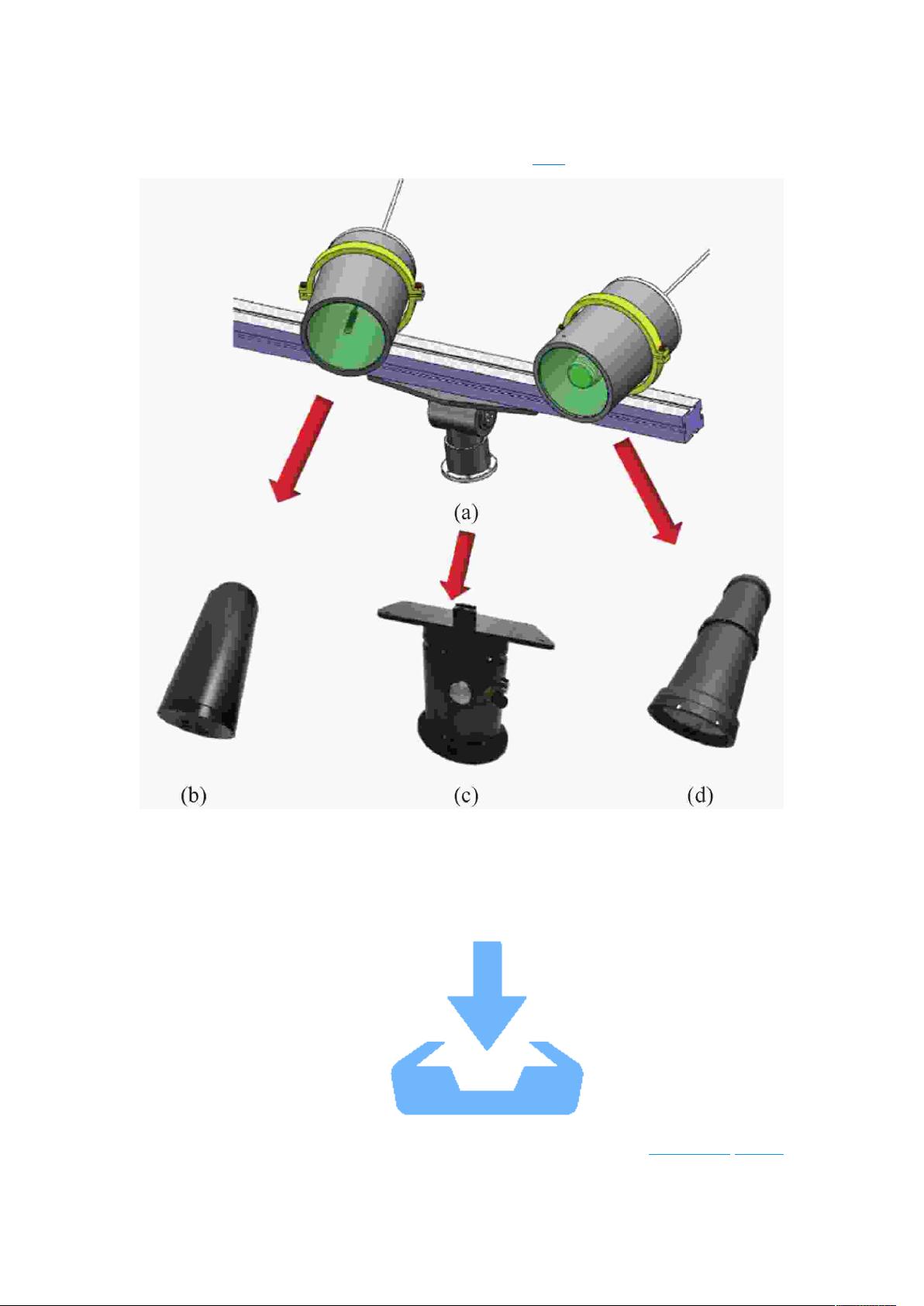
1. 水下激光扫描系统
激光三维扫描系统由相机、线激光器、转台和相应的控制装置组成。相机采用华谷动
力 WP-UT530 M 工业相机,分辨率为 2592×2048 pixel,光谱范围为 380~650 nm;激光器
采用波长为 520 nm 的线形激光器,功率为 50 mW;镜头为自主设计的焦距为 25 mm,视
场角为 34°的水下镜头;将相机和激光器分别分装在两个独立的水密装置内,固定在支架
上,通过调节导轨上的 T 型螺母的位置及角度,可以改变激光器和相机的相对角度和位
剩余14页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4516
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 73、出售游戏礼包赚钱,简单的信息差项目.pdf
- 基于TypeScript的广州商学院鸿蒙研究院开发者手机计算器设计源码
- 76、无脑量产,3个短平快短视频赚钱攻略.pdf
- 开发板ARM+FPGA架构运动控制卡 运动控制器 本运动控制卡采用ARM单片机+FPGA架构; ARM单片机是基于Cortex-M3内核的LM3S6911,插补核心算法均在该ARM内完成,一方面通过
- 78、打造IP的赚钱项目,赚钱并不困难.pdf
- 基于Java Swing JFrame实现的银行排队叫号器设计源码
- 85、亚马逊跨境电商从0到月入6w+的复盘.pdf
- 87、车载U盘项目,月入10万是怎么做到的?.pdf
- 98、淘宝虚拟资源项目.pdf
- 97、没有关键词的蓝海产品,截流躺赚的淘宝项目.pdf
- 主题利用Simulink对Dual Extended Kalman Filter(DEKF)进行验证 方式主卡尔曼滤波器用来估计锂电池的SOC和端电压,辅助卡尔曼滤波器用来估计锂电池的内阻R
- 基于51单片机的火灾报警系统仿真设计 实现功能: 1、通过按键设置温度及烟雾浓度阈值上限(±1) 2、通过温度传感器(DS18B20)采集温度,当温度高于所设阈值时,LED点亮、蜂鸣器报警 3、通过滑
- 永磁同步电机Matlab Simulink仿真模型 矢量控制直接转矩控制滑膜无感高频注入扩展卡尔曼模型参考自适应开环控制VFIF弱磁mpta模糊控制
- MATLAB基于卡尔曼滤波的锂蓄电池SOC设计 用自适应卡尔曼滤波方法,基于锂离子动力电池等效电路模型,在未知干扰噪声环境下,在线估计电动汽车锂离子动力电池荷电状态 (SOC) 采用基本卡尔曼滤波和
- 涂布机程序源代码,三菱Q系列PLC和威纶通触摸屏 触摸屏:MT8102iE,PLC:Q03UDE 程序注释,电路图纸都有
- 汇川AM中型PLC程序,汇川IT7000系列触摸屏程序 自己写的设备分期付款程序,汇川中型PLC-分期付款程序 1、包含PLC时间的读取与设置 2、使用随机滚动码计算解加密(3天、7天、1个月、三个
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


