

0. 引 言
在大型设备的运转中,关键构件中经常出现形式多样的裂纹,如钢轨的滚动接触疲劳
裂纹
[1]
、压力管道的应力腐蚀裂纹
[2]
等。构件内裂纹在设备的使用过程中会不断扩展,当裂
纹扩展到快速发展阶段极易引发设备构件的脆性断裂,危害人员生命和造成经济损失
[3]
。
因此,采取有效的方法对设备裂纹的检测与识别是非常必要的。
超声红外热成像(振动热成像)检测技术作为新型裂纹检测方法被广泛关注。其理论
研究、数学模型的推导以及检测可行性的验证已相对成熟。超声红外热图像处理方法的研
究也成为近年来的热点。参考文献[4]提出的方法有效地滤除了图像噪声,实现了分割目标
缺陷区域;参考文献[5]提出了基于小波变换的超声红外热图像处理方法,有效提高了红外
图像的对比度与信噪比;参考文献[6]指出超声红外热成像作为一种用于非自热物体质量评
价和安全保证的无损检测方法,其未来发展趋势必定是通过引入人工智能方法来快速、可
靠和智能地进行检测。深度学习的飞速发展会使得基于红外热成像的机器视觉越来越智能
化和高度自动化,从而大大增加其应用范围。
卷积神经网络(Convolutional Neural Network,CNN)在图像自动识别中获得巨大成
功,同时也在缺陷识别中发挥着重要作用。图像经过卷积变换及降采样后被映射到一个较
低维的空间中,并自动地提取图像的特征。参考文献[7]设计了基于改进型 CNN 的深度学
习算法,成功地解决了现有焊接异常图像识别算法误检率与漏检率偏高的问题,且该算法
对多种焊点缺陷类型识别优势巨大;参考文献[8]通过对短时傅里叶变换后振动信号的时频
图进行 CNN 的训练,实现了对滚动轴承的故障状态识别。
文中针对金属疲劳裂纹检测与识别的问题,结合超声红外热成像技术以及 CNN 在图
像特征自动提取与图像分类以及裂纹缺陷识别中的广泛应用,提出了一种结合超声红外热
成像与 CNN 的裂纹检测与识别方法。利用超声红外热成像技术获得多种不同尺寸裂纹的
红外热图像,并将预处理后的红外热图像输入到 CNN 中进行特征自动提取与识别分类。
实验结果表明,CNN 在超声红外热像的后处理分类中具有一定的可行性,同时设计的
CNN 具有较高的识别精度和鲁棒性,能有效地对金属疲劳裂纹进行识别分类。为超声红外
热图像的后续研究提供了参考方向。
1. 理论基础
1.1 超声红外热成像检测技术
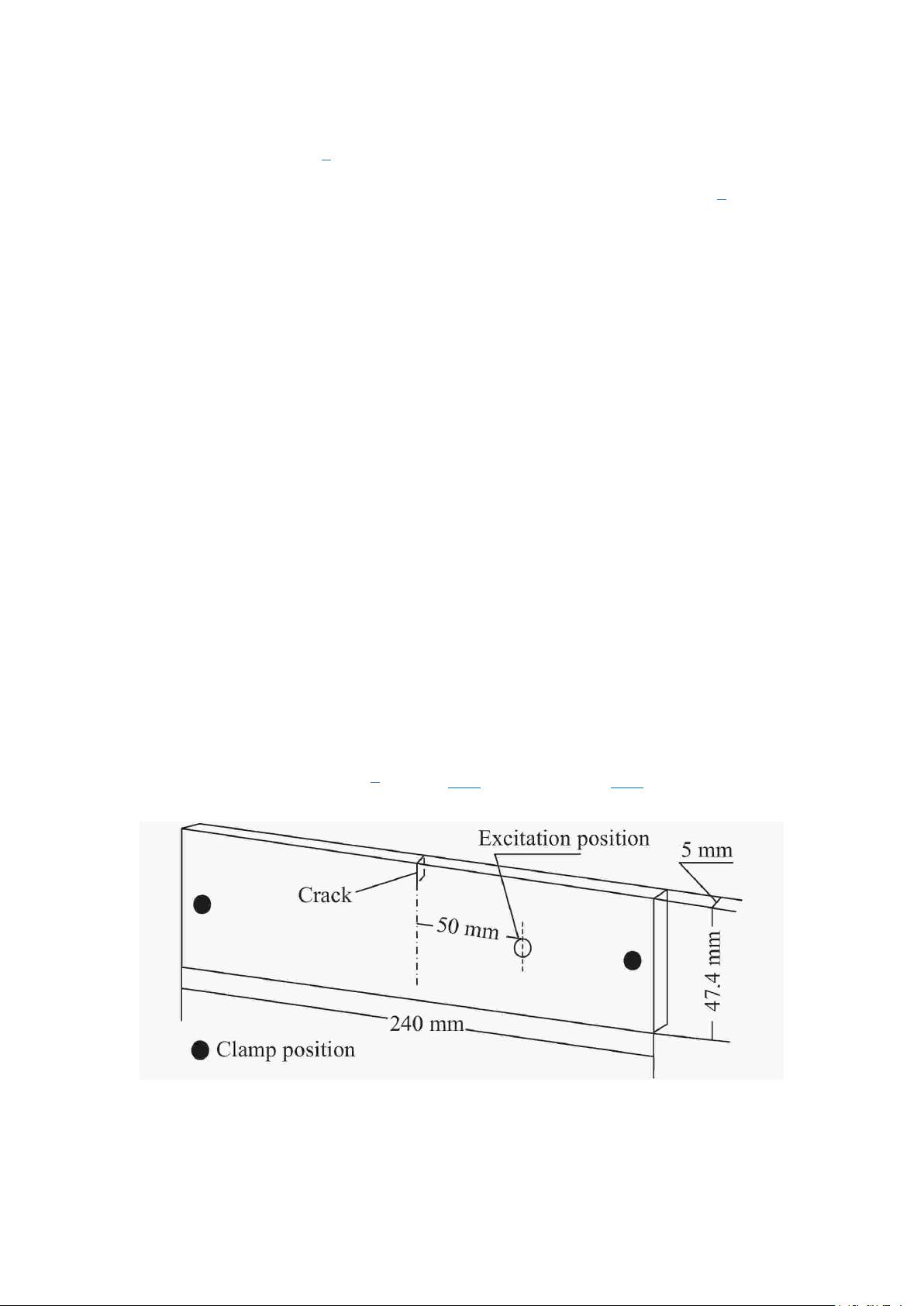
超声红外热成像检测技术使用超声脉冲作为激励源,振动能量注入被测试件,能量传
播至裂纹、脱粘等接触面类型缺陷区域时,缺陷区域因摩擦、塑性变形等产生热量,产生
的热量同时也取决于试件材料和施加的振动应力水平
[9]
。产生的热量使缺陷处局部升温,

剩余15页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4501
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- Java+JSP+Mysql实现Web学生成绩管理系统源码(高分项目)
- 三相LCL型并网逆变器 MATLAB 内含:SPWM模块,LCL滤波结构,有源阻尼电容电流比例反馈模块,PI控制器模型 采用dq轴电流矢量控制 模型图、电网电压和并网电流波形图如下 适用matla
- 基于spring的留学信息推荐系统的设计与实现源码(java毕业设计完整源码).zip
- 机械设计在线式PCBA点胶机sw18可编辑全套设计资料100%好用.zip
- 基于SSH框架的教师管理课程教学系统设计与实现
- (176594622)数据库课程设计065ssm体育器材租借管理系统hsg4912AHA5程序.sql
- (176961994)java学生学籍管理系统(源代码+论文+开题报告+外文翻译+答辩PPT)
- 基于web的金融交易平台设计与实现.doc
- 四旋翼PID控制仿真模型 matlab仿真程序,支持姿态单独控制,阶跃信号,方波,正弦波直接输入姿态环,波形完美,可以选择接入位置环,定点控制,轨迹跟踪,一键切轨迹等功能 带公式推导文档
- (177034626)基于ASP网络办公OA系统设计(论文+源代码+开题报告+答辩PPT).rar
- 基于Vue+SpringBoot的考研学习分享平台设计与实现源码(java毕业设计完整源码+LW).zip
- (177365632)多目标粒子群优化算法(MOPSO)【含Matlab源码 033期】.zip
- 程序清理和卸载工具 App Cleaner & Uninstaller for Mac v8.2.3
- 卸载和清理工具 App Cleaner for Mac v8.4.2
- 基于web的快递员物流管理系统论文.doc
- 系统维护工具 CleanMyMac X for Mac v4.15.2
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


