交直流混合微电网并联双向互联变换器环流抑制与功率控制.docx
版权申诉
147 浏览量
2022-12-15
14:24:37
上传
评论
收藏 4.27MB DOCX 举报


1 引言
交直流混合微电网能够以更高的效率和更好的兼容性,有效地解决各种交
直流负载、分布式电源和分布式存储的集成问题
[1-2]
。从结构上看交直流母线将
系 统 分 为 三 个 部 分 , 分 别 是 交 流 子 微 网 , 直 流 子 微 网 和 双 向 互 联 变 流 器
(Bidirectional interlinking converter,BIC)。在全球范围内,已有多个交直流混合
微电网项目得到了验证,其中包括荷兰 Bronsbergen 假日公园
[3]
、欧洲超级电网
[4]
等。在交直流混合微电网中,BIC 作为连接交流和直流母线的纽带,主要实现交、
直流侧微电网间功率双向流动
[5]
。随着分布式电源数量以及负荷的不断增加,要
求 BIC 将具有更高的功率处理能力。由于单个 BIC 功率受限,常采用多并联 BIC
结构以满足微电网不断扩容的需求
[6]
。
在交直流混合微电网能源管理方面,特别是在孤岛系统中,研究人员已做了
大量研究
[7-8]
。其中,常采用下垂控制策略调节交直流微电网中各分布式电源的
功率分配
[9⇓ -11]
,但该策略无法用于多并联 BIC 之间的功率分配;文献[12]提出一种
分布式自适应修正的下垂控制策略,然而该方法需要在通信中传输 50 Hz 范围
的交流电流信息,同样不适合于 BIC 结构。文献[13]中下垂控制被分配到系统的
变换器中,以实现对直流子微网电压调节,但仅用于能量的单向流动。文献[14]
中直流微电网通过 BIC 接入电网,同样仅实现功率单向流动。文献[15]提出了一
种自治运行下垂控制策略。上述方案均无法保证两子微网负荷在稳态下均匀分
配。
与单个 BIC 控制方案不同,交直流混合微电网中多并联 BIC 间存在严重的
环流问题,导致系统损耗增加,甚至损坏开关器件。文献[16]对环流产生机理进
行详细研究,但数学表达式过于复杂,物理概念不清晰。文献[17]通过实时调节
下垂系数实现对环流的抑制,但下垂系数的变化影响了输出电压质量。文献[18]
通过减少线路阻抗差异来抑制变换器之间的环流,但该方法引入的虚拟阻尼只
呈现感性,与线路阻抗的阻感特性不匹配。文献[19]提出了一种无差拍的电流控
制方法,通过 零序电流反馈量控制变换器的零序电压,从而有效 抑制环流,但该
方法难于应用于多台并联的场合。
针对上述问题,本文提出了一种适用于交直流混合微电网中多并联 BIC 运
行的分布式电源管理控制策略。其中每个 BIC 具有独立的局部分布式控制器,
均可检测到网侧公共频率。通过局部分布式控制实现交流和直流子微网间的负


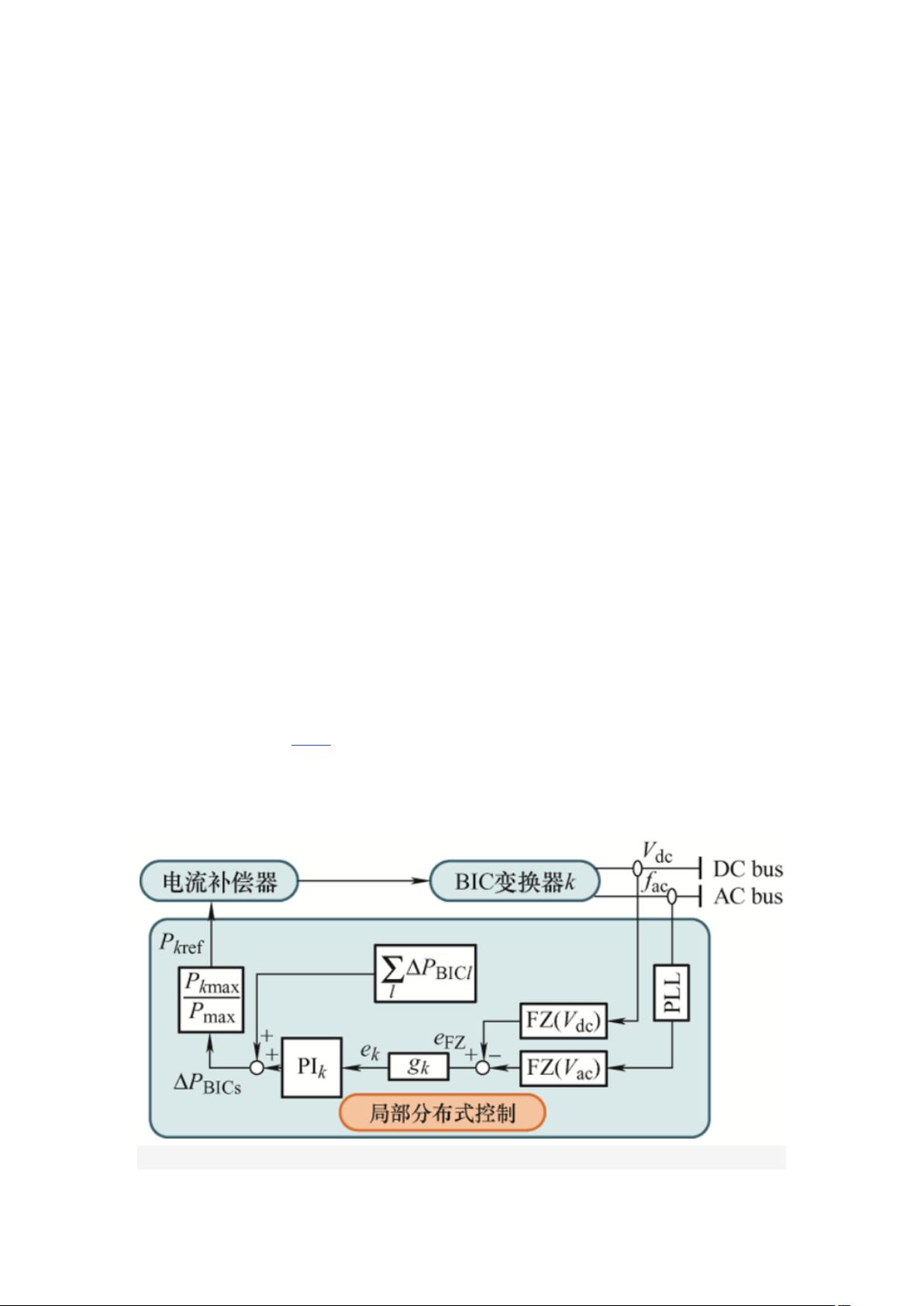

剩余21页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3542
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











