

1 引言
随着城市的发展,输电杆塔周围的导线跨越道路、建筑物等导线对于跨域
物净空距离不足的情况会发生,在这情况下需要对杆塔进行升塔作业,其升塔作
业之前需要对杆塔在提升向土壤施压发生沉降后进行调平才可进一步对杆塔
提升。目前国内行业中常规采用的解决方法是手动调平方式为主,过分依赖经
验且不能够适应液压杆在土壤上受压后的不均匀沉降,所以有必要对电力杆塔
调平技术进入深入研究,提出有效可行的解决方案。
杆塔整体调平实现传统的方法为借助经纬仪监视铁塔的高度,调节铁塔稳
定拉线保证铁塔垂直水平
[1,2,3]
。调平过程中最重要的环节是在液压杆对土壤施
压情况下发生沉降后对输电杆塔进行调平控制,要监控铁塔倾斜角度,根据倾斜
角度合理调节不同液压杆上升速度和高度。目前调平控制研究中,房怀英等
[4]
提
出以模糊 PID 算法作为调平控制方法来实现对沥青砂浆车液压进行调平。王冰
[5]
提出基于 PID 神经网络对调平系统进行控制的方案。史海 红
[6]
采用人工神经
网络控制器对混凝土摊铺机调平。冯仪等
[7]
提出车载雷达机电式自动调平控制
系统。
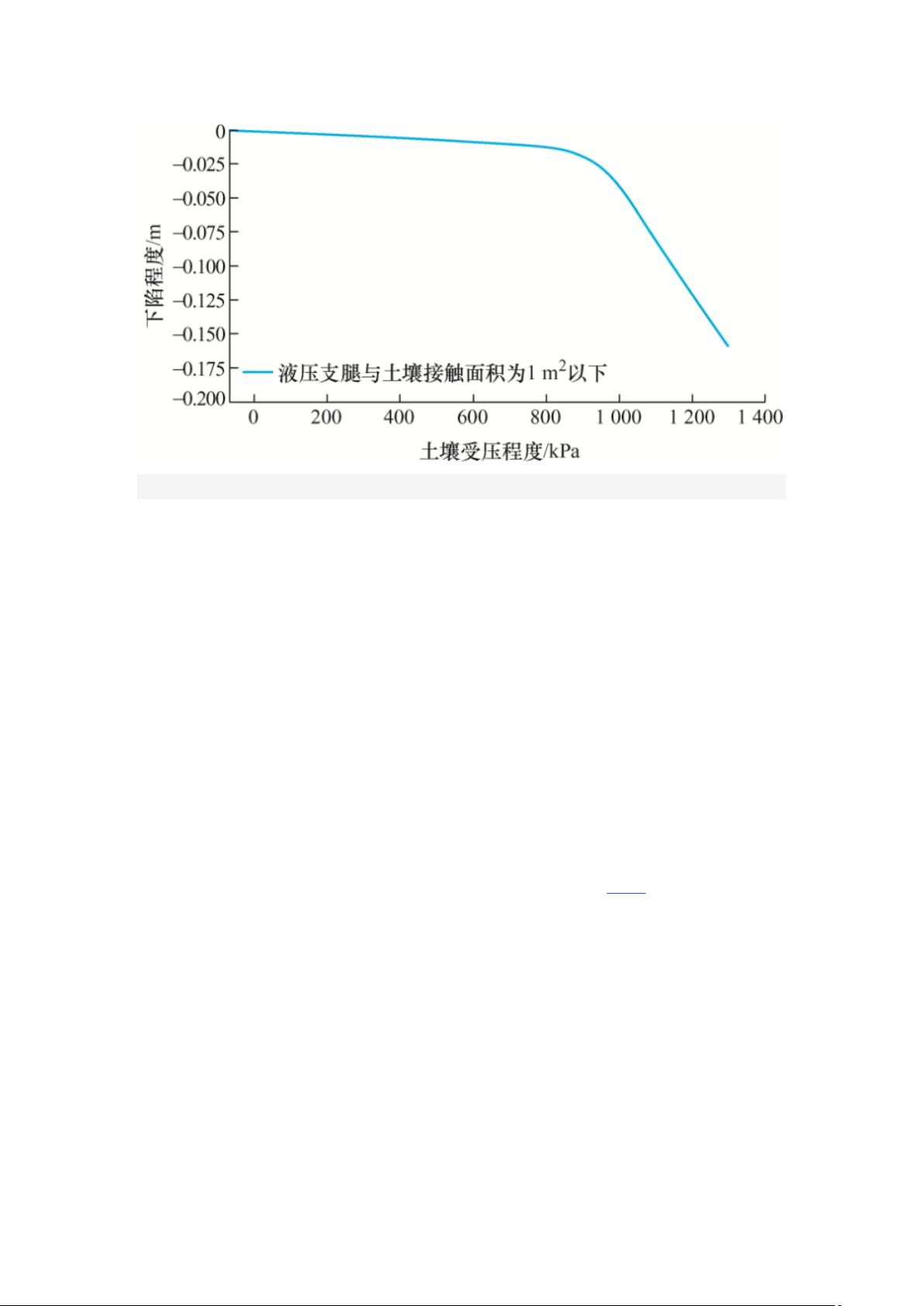
结合以上文献,对受压土壤下陷特性进行研究,在土壤受压程度与下降程度
为线性关系的条件下,提出利用 IMU 和毫米级的 RTK 传感器测量塔身倾斜角度,
对土壤受压发生沉降导致杆塔倾斜的情况进行监控,并以卡尔曼滤波对其二者
数据进行融合更新去噪,在该融合数据中利用模糊 PID 控制算法控制液压杆在
沉降发生后进行调平控制,最终实现整体调平过程中塔身处于无倾斜的姿态,防
止倾斜角度过大导致输电铁塔倾倒。此方案能够以电子设备代替人力,保证施
工的安全性,提高施工效率。
2 调平过程分析
本文提出的方案是利用 IMU 和毫米级 RTK 传感器对塔身倾斜度测量,并以
此测量数据来对杆塔进行调平控制。在调平过程中对杆塔状态的分析能够具体
地使得调平策略更加有效。具体液压杆部署位置如图 1 所示。
图 1
剩余16页未读,继续阅读
资源评论

 luozhip5092024-12-12资源很受用,资源主总结的很全面,内容与描述一致,解决了我当下的问题。
luozhip5092024-12-12资源很受用,资源主总结的很全面,内容与描述一致,解决了我当下的问题。

罗伯特之技术屋
- 粉丝: 4558
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 西门子数控系统调试与通讯:828D、840D、808D的参数配置、梯形图修改及外部IO增加案例分享,西门子数控系统调试与配置手册:涉及828D、840D与808D系统的参数调整、梯形图修改与外部通讯实
- 中国各类互联网应用的用户规模数据.zip
- 中国各省地图(包含港澳台) 山西(shanxi)陕西(shanxi1)
- E000620医院体检医疗健康类网站模板+PHP+Mysql+响应式+CMS+建站模板
- 中国各省对应各市级地图json
- 大模型基础-30分钟一文了解大模型基础知识(人工智能必读).zip
- COMSOL模拟:二氧化碳充装与输气管道泄漏的耦合温度场分析,输出速度与温度分布,COMSOL模拟:二氧化碳充装与输气管道泄漏的耦合温度场分析,输出速度与温度分布,comsol 二氧化碳充装二氧化碳输
- 基于python开发的简单的windows桌面画笔功能,全部使用快捷键操作(python源码+图文教程),开箱即用,非常优质的资源
- C#上位机与西门子PLC通讯教程:数据读取存储、报表生成、报警历史查询及变量自定义配置实战案例详解,C#上位机与西门子PLC通讯教程:数据读取存储、报表生成、报警历史查询及变量自定义配置实战案例详解
- 基于遗传算法的锂电池二阶RC模型参数辨识技术研究-附Matlab程序与多种工况充放电数据集(DST、FUDs、US06、BJDST等八种),基于遗传算法的锂电池二阶RC模型参数辨识技术研究-附Ma
- 利用格子玻尔兹曼方法LBM D1Q3模型在Matlab中模拟一维扩散方程的研究,使用格子玻尔兹曼方法LBM D1Q3模拟一维扩散方程的Matlab实现与应用研究,使用格子玻尔兹曼方法LBM D1Q3模
- 流水线电机变频调速系统设计 MATLAB电路建模仿真
- 2022年美国各州基本经济统计数据.zip
- 基于Transformer的Matlab代码:数据回归与多场景预测工具箱,Transformer在数据回归分析中的应用-基于Matlab代码的实战教学,Transformer回归 Matlab代码
- Sigma-Delta ADC Matlab模型集合:包含CTSD调制器、FFT分析、动态静态特性仿真与教程,方便入门学习,Continuous-Time Sigma-Delta ADC Matlab
- 基于Comsol仿真的兰姆波导波在钢板中的传播及裂隙检测分析,Comsol仿真中兰姆波导波在有限尺寸钢板内传播的裂隙检测技术研究,Comsol仿真无损检测时产生的兰姆波 导波在宽度和厚度有限的钢板中传
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


