

旋翼机集群编队穿越障碍技术是一个多学科交叉的领域,涉及到了编队飞行控制
[1-2]
、
无人机集群自组织网络
[3-4]
、机载传感器数据融合
[5-6]
及空间环境智能感知
[7-8]
等。其中,旋翼
机集群对目标的感知定位与避障能力是其完成复杂飞行任务的重要基础之一。考虑到旋翼
机的载荷能力,轻便型视觉传感器是作为辅助定位与避障穿越任务的良好选择。针对此类
问题,国内外已经展开了相关研究,文献[9-12]提供了目前常见的一些基于视觉辅助的旋翼
机编队导航方案;文献[13-14]提供了基于主−从式(leader-follower)异构旋翼机编队的导航方
案。此外,在近地面低空飞行的情况下,由于气压计不稳定带来的旋翼机与地面相对测高
误差也是一个需要解决的难题。随着激光雷达的发展,小型 LiDAR 激光传感器可作为旋翼
机低空测高的良好选择,研究者们也开始关注该领域的相关问题,如基于 LiDAR 的地形测
量
[15]
、机载 LiDAR 辅助避障
[16]
、LiDAR 与惯性导航器件融合定位
[17]
等。
旋翼机编队技术应用广泛,如空中侦测、编队作战打击、无人机物流等。这些应用中
涉及穿越复杂障碍
[18-20]
,如峡谷、高楼缝隙、大型物流仓库的门窗等。如何为无人机提供
有效的环境感知和穿越障碍技术是一个亟待解决的问题。基于以上思考,本文提出一种飞
行通道约束的概念,将街道两边建筑或者具有直线特征的障碍抽象成类似矩形门框的两条
竖边,并精准估计门框的中心点,以此作为期望航点实现对障碍的穿越。
该研究内容参加了 2018 年由空军装备部举办的首届“无人争锋”智能无人机集群系统
挑战赛科目 1(SC-1):密集编队穿越竞速赛。主要研究贡献如下:
1) 完成异构无人机编队穿越仿真验证,并构建了一套无人机集群编队飞行实机软硬
件测试平台;
2) 设计一种基于单目视觉辅助的目标相对定位方法,实现了无人机编队在线实时穿
越与路径规划;
3) 设计一套多传感器融合的安全飞行策略,并设计一种基于激光定高数据的时域滤
波器,为无人机编队在低空复杂环境中的飞行定高提供保障。
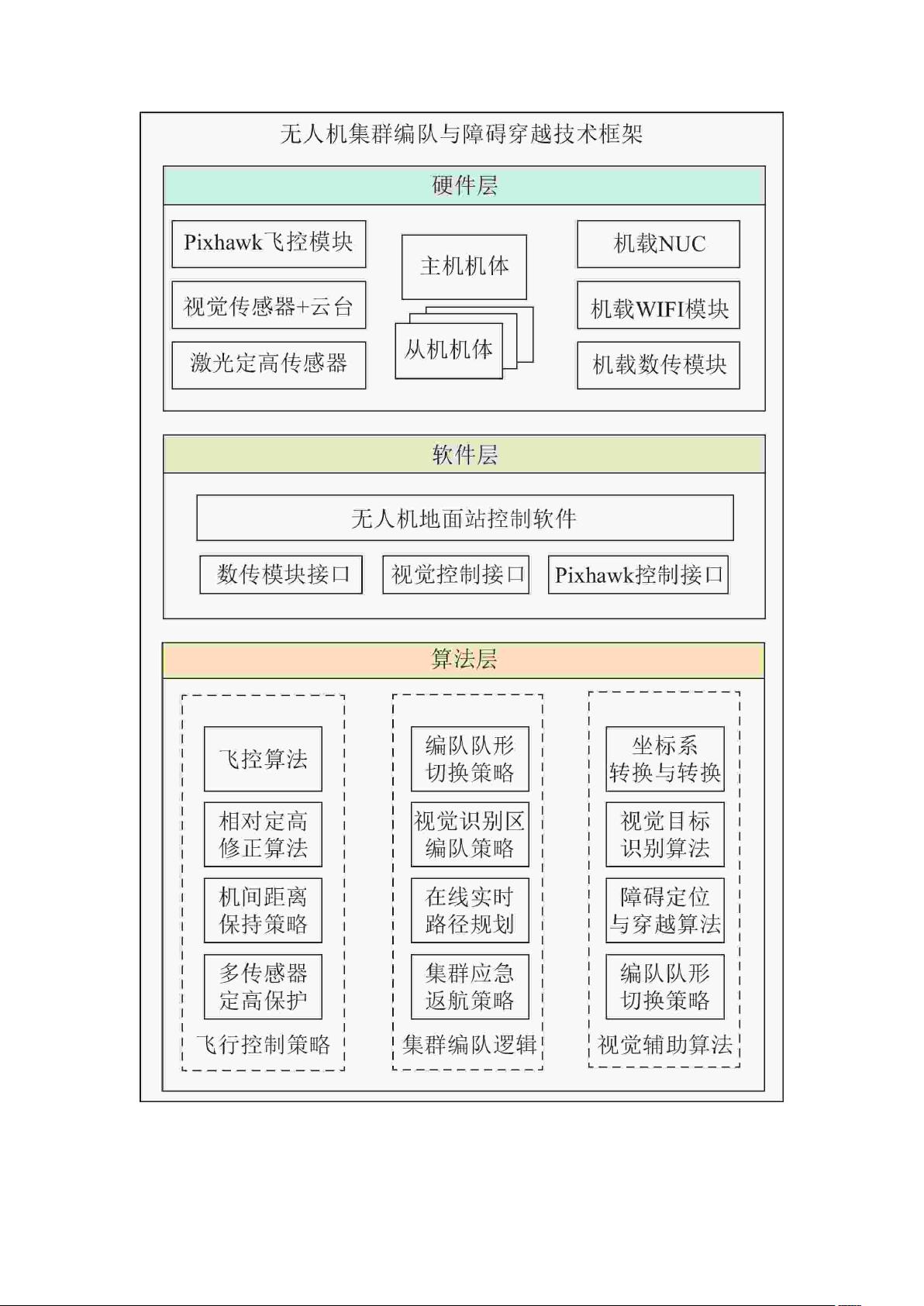
1. 无人机编队穿越技术总体框架
总体框架研究将小旋翼无人机编队穿越系统分为硬件、软件和算法 3 个层面,如图 1
所示。
以此技术框架为基础,进一步研究基于视觉辅助的小旋翼无人机编队穿越障碍技术,
以解决主−从式异构旋翼机编队飞行任务中的避障穿越、路径规划、安全飞行策略等技术
问题。
2. 无人机编队硬件平台构建

剩余16页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4525
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 新瑞能源(储能系统解决方案提供商,东莞市新瑞能源技术有限公司)创投信息
- 《Cocos 游戏开发从入门到精通全攻略》,为你开启游戏开发的大门
- 调制信号的连续小波变换CWT时频谱图分析:二次线性Chirp调频信号、蝙蝠回声定位信号及神户地震数据的时频定位能力展示(MATLAB r2021b),调制信号的连续小波变 CWT时频谱图 程序运行环境
- 行者AI(游戏全产业链AI赋能平台,成都潜在人工智能科技有限公司)创投信息
- Java毕业设计-springboot-vue-大学生创新创业项目管理系统(源码+sql脚本+29页零基础部署图文详解+30页论文+环境工具+教程+视频+模板).zip
- Java毕业设计-springboot-vue-船运物流管理系统(源码+sql脚本+29页零基础部署图文详解+23页论文+环境工具+教程+视频+模板).zip
- Java毕业设计-springboot-vue-大学生计算机基础网络教学系统(源码+sql脚本+29页零基础部署图文详解+27页论文+环境工具+教程+视频+模板).zip
- 云骥智行(L4自动驾驶解决方案提供商,上海云骥智行智能科技有限公司)创投信息
- Java毕业设计-springboot-vue-大学生平时成绩量化管理系统(源码+sql脚本+29页零基础部署图文详解+33页论文+环境工具+教程+视频+模板).zip
- Java毕业设计-springboot-vue-大学生在线租房平台(源码+sql脚本+29页零基础部署图文详解+33页论文+环境工具+教程+视频+模板).zip
- Java毕业设计-springboot-vue-大学生就业服务平台(源码+sql脚本+29页零基础部署图文详解+40页论文+环境工具+教程+视频+模板).zip
- STM32 F103系列芯片OTA远程升级:WiFi连接下的可靠固件更新流程 升级过程包括HTTP GET指令获取服务器固件信息、版本对比、下载地址写入flash及重启更新等步骤 升级文件需进行CRC
- Java毕业设计-springboot-vue-当代中国获奖知名作家信息管理系统(源码+sql脚本+29页零基础部署图文详解+30页论文+环境工具+教程+视频+模板).zip
- Java毕业设计-springboot-vue-房屋租赁管理系统(源码+sql脚本+29页零基础部署图文详解+32页论文+环境工具+教程+视频+模板).zip
- Java毕业设计-springboot-vue-扶贫助农系统(源码+sql脚本+29页零基础部署图文详解+32页论文+环境工具+教程+视频+模板).zip
- H桥驱动circuitjs1软件仿真
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


