基于道路场景理解的巡检机器人避障方法研究与应用.docx
版权申诉
194 浏览量
2022-12-01
09:06:24
上传
评论
收藏 413KB DOCX 举报


1. 引言
近年来,随着人工智能和机器人技术的不断进步,作为机器人中重要组成部分之一的
巡检机器人也得到了长足的发展,被广泛应用于工业、农业、电力、航空航天、医疗等各
个领域
[1]
.对于巡检机器人而言,准确的导航避障是其顺利完成巡检任务的前提
[2]
.目前,大
多数巡检机器人主要利用测距传感器,如超声波
[3]
、激光雷达
[4]
等,结合避障算法来实现机
器人自主避障.尽管距离传感器获取的数据精度较高,但存在获取的信息稀疏、场景可理解
性差等局限,较大的限制该技术的进一步应用
[5]
.而随着图像处理技术的发展,基于视觉的
机器人避障方法研究逐渐成为了研究热点
[6]
.通过视觉方式可以获取丰富的场景信息,可以
更好的辅助机器人完成避障,但传统的基于视觉避障方法需要人工设计特征来对障碍物和
道路进行识别(如 HOG、SIFT、Haar 等),该方式需要较强的专业知识,且泛化能力和鲁棒
性都较差,在实际应用中效果也不理想
[7]
.因此,研究一种基于深度学习的视觉避障方法,
可以有效避免传统方法的弊端,并能充分利用道路环境信息,对巡检机器人智能化发展以
及实际落地应用都有较大的推进作用.
对于深度学习与巡检机器人结合的避障方法,大量学者从不同角度进行了深入的研
究,并取得了一系列成果.刘藏龙等人
[8]
基于 AlexNet 深度神经网络设计了一套端到端的机
器人避障方法,通过对输入图像训练学习来预测机器人转向命令,实现导航避障.鲜开义等
人
[9]
针对变电站道路场景,设计了一种联合图像分类和语义分割的网络,通过对道路场景
分类和语义分割后处理判断实现全局和局部导航避障.Singhani 等人
[10]
将语义分割网络与传
统边缘检测技术相结合,对机器人道路可行区域进行预测,并对可行区域生成 3D 点云指
导机器人实时导航.Jiayang 等人
[11]
针对医院道路场景,利用利用双向循环神经网络预测行人
轨迹,生成动态障碍物信息,并将动态障碍信息转化为全局信息与静态障碍信息进行融
合,进而实现避障.尽管目前已有较多方法将深度学习技术应用于道路场景理解实现机器人
避障,但由于深度网络的参数多、计算量大等问题使机器人避障效率较低.同时,大多数现
有方法也忽略了机器人导航避障时场景之间的关联性,使网络存在部分冗余计算.
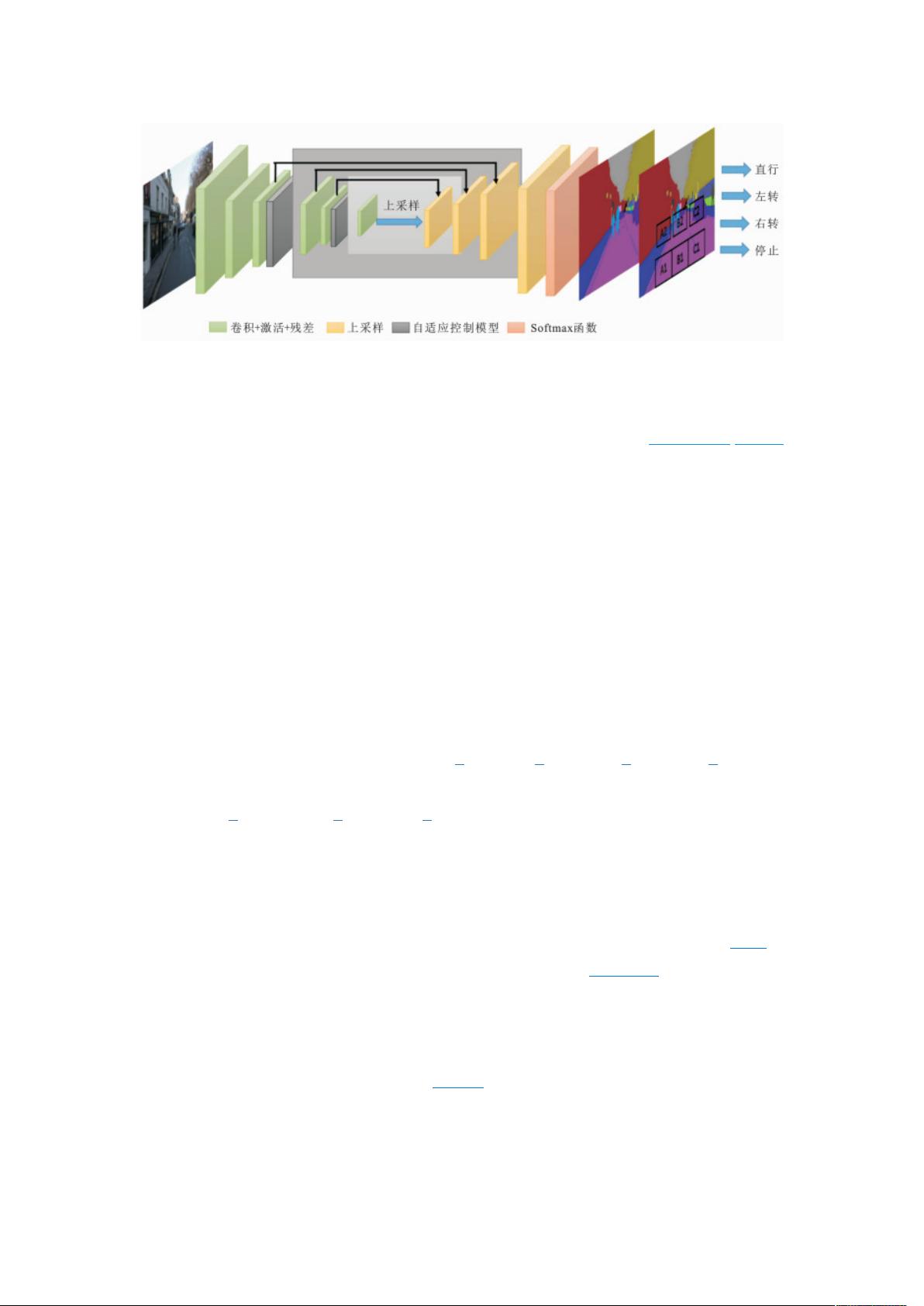
2. 道路场景理解避障模型
2.1 整体框架
本文所搭建的基于道路场景理解的避障模型(RSUNet)整体结构如图 1 所示.
剩余13页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3651
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 基于matlab实现电磁优化计算功能,进行线型规划优化电磁设计.rar
- 基于matlab实现带精英策略的非支配排序遗传算法matlab 源码.rar
- 基于matlab实现差分进化算法,最新的用于替代遗传算法,是以后的主要发展方法.rar
- VSCode配置c/c++环境教程.md
- 基于matlab实现标准合作型协同进化遗传算法matlab源程序
- 七下人教.zip
- 基于matlab实现本份代码能对图像进行gabor滤波处理,结合指纹方向图以及指纹沟壑频率特性,对指纹图像进行增强.rar
- 基于matlab实现RBM神经网络实现了手写数字体识别的GUI程序.rar
- 基于matlab实现蝙蝠算法优化相关向量机建模对数据进行建模和预测.rar
- 基于matlab实现编写的禁忌搜索算法,解决了TSP问题,对初学者有重要的参考价值.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


