一种点线面约束的激光雷达和相机标定方法.docx
版权申诉
134 浏览量
2022-11-29
17:43:28
上传
评论
收藏 564KB DOCX 举报


随着传感器技术和计算机视觉技术的快速发展,激光雷达和相机已成为移动测量、自
动驾驶、机器人等领域不可或缺的传感器
[1-2]
。激光雷达精度高、抗干扰性好,不受光照变
化的影响,能获取准确的深度信息,但是缺乏色彩和纹理信息;相机能获取色彩、纹理等
信息,但难以直接测量长距离的深度
[3]
,且稳定性差,易受光照、天气的影响。这两类传
感器具有很强的互补性,二者融合能获得更丰富的环境信息
[4]
。而精确稳定的外参数标定
是激光雷达和相机融合感知定位的基础,因此,高效的外参数标定在自动驾驶和移动机器
人应用中至关重要。
目前,激光雷达和相机的标定方法大致可以分为无目标的方法和基于目标的方法。无
目标的方法不需要人为提供标定目标,可以分为基于特征的方法和基于运动的方法
[5]
。基
于特征的方法主要利用了建筑物的常见结构,Gomez-Ojeda 等
[6]
提出了利用墙角三面体来
提供线-面和点-面约束;Bai 等
[7]
提出了基于环境线特征和无穷点来进行标定;Napier 等
[8]
和 Pandey 等
[9]
通过最大化图像灰度和激光雷达反射率的相关性来进行标定。基于运动的方
法不要求两种传感器有共视区域,可以视为手眼标定问题
[10]
,Huang 等
[11]
将 Gauss-
Helmert 模型用于求解运动约束,同步优化传感器的相对运动以及外参数,减小了传感器
噪声的影响。此外,基于深度学习的方法也逐渐被应用于相机和激光雷达外参数的标定
[12-
15]
,Schneider 等
[16]
率先将 RegNet 网络用于求解传感器之间的六自由度参数,将传统的校
准步骤(特征提取、特征匹配和全局回归)转换为一个具有实时功能的卷积神经网络;
Iyer 等
[17]
用自监督网络 CalibNet 来预测校准参数,使输入图像和点云的几何一致性和光度
一致性最大化,但基于深度学习的标定方法对计算平台要求较高。以上方法中,基于特征
的方法通常需要可靠的初值和合适的外部环境;而基于自运动的方法受到测量值不确定性
的影响;基于目标的方法需要人为提供标识物,常用的标识物为棋盘格。Zhang 等
[18]
率先
将棋盘格用于相机和激光测距仪的外参数标定,但至少需要 5 组观测进行求解;Pandey
等
[19]
提出了一种使用棋盘法线向量的校准方法,通过最小化深度和图像帧之间对应关系的
函数来估计激光雷达和相机之间的旋转和平移;Geiger 等
[20]
在场景中放置多个棋盘格,通
过面-面、点-面约束解算外参数;Kim 等
[21]
使用单个棋盘格,通过匹配多帧的面特征来求
解外参数。以上研究都没有使用标定板的边缘线信息,Zhou 等
[22]
和 Zhu 等
[23]
加入了线特
征,Zhou 等
[22]
用多帧棋盘格的直线和平面信息建立约束,并给出了闭式解,但未使用角点
信息;Zhu 等
[23]
用 V 型棋盘格来求解外参数,并且建立了二维的点-面、点-线、线-面约
束,但其构建的点-线约束不能线性化求解,且 V 型棋盘格需要定制,价格比较昂贵。
除棋盘格外,还有其他的标识物被用于激光雷达和相机的外参数标定。Park 等
[24]
用多
个白色方形板进行标定,只使用了标定板的角点信息。Pusztai 等
[25]
用立方体箱子进行标
定,根据角点约束求解外参数,其局限在于立方体必须具有正交特性。Lee 等
[26]
用球形物
体进行标定,利用球体中心的对应关系求解外参数,但球形标定物难以制作。Dhall 等
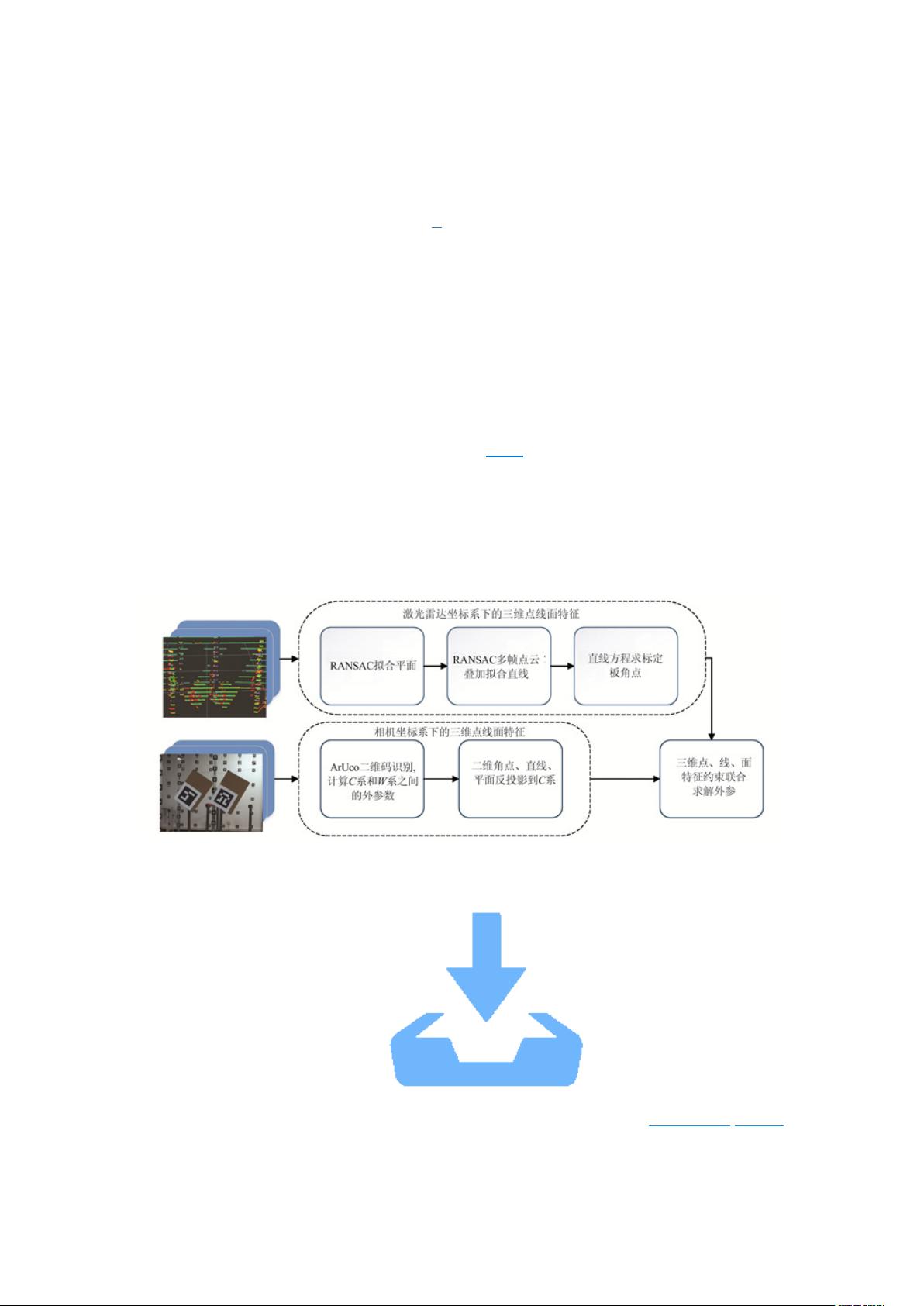
[27]
用
方形板贴上 ArUco(augmented reality University of Cordoba)二维码作为标定工具,易
于制作、成本低廉。其原理是建立三维角点的约束,用 Kabsch 方法求解。但该方法的角
点易受到噪声影响,且没有用到直线和平面信息,约束精度不够。Chai 等
[28]
在 Dhall 等
[27]
的基础上进行了改进,使用了定制的 ArUco 二维码立方体作为标定工具,通过拟合平面求
剩余10页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3655
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











