

平交道口是铁路和公路的交汇点,一旦发生交通事故,不仅影响整个交通运营效率,
还会引起严重的人员伤亡,因此,平交道口的安全性对轨道交通和公路交通至关重要。
完善的安全防护措施,既能保证行人和车辆可以预先避让列车,又能加强对道口的监
护,有效地避免交通事故的发生
[1]
。文献[2]研制了一款铁路平交道口预警和管理设备,该
设备能够提高平交道口的管理效率,降低平交道口发生事故的概率;文献[3]在铁路平交道
口设置双向智能报警系统,有效减少了平交道口交通事故的数量和交通拥堵的频次;文献
[4]研究并建立了平交道口安全评价体系;文献[5]提出的多参数道口作业流程更符合实际情
况,改进了多列车接车流程,并提出了接车过程中异常情况下的应对方案;文献[6]通过计
算机联锁系统驱动相应报警继电器,结合 DX3 型道口信号设备,实现道口的自动报警,再
通过延时开放信号显示的方法确保通过道口的列车、汽车、行人的安全;文献 [7]利用自
主设计的 AV-FMS 计算机视觉系统实现对铁路平交道口的安全监测;文献[8]采用基于模型
的方法对平交道口进行建模,基于模型检验的方法分析平交道口的安全性,验证了有色
Petri 网用于平交道口安全性分析的可行性。
本文在分析和研究前人所做工作的基础上,研究基于 Petri 网的平交道口信号设备故
障诊断方法。
1. 平交道口信号设备及其工作原理
平交道口设置于铁路与公路在同一平面交汇的地方。其适用于道路通行量低或立交无
法设置的位置。
1.1 平交道口信号设备组成
道口信号设备包括公路侧信号设备和铁路侧信号设备。公路侧信号设备由自动栏木、
道口音响和道口信号机等组成。
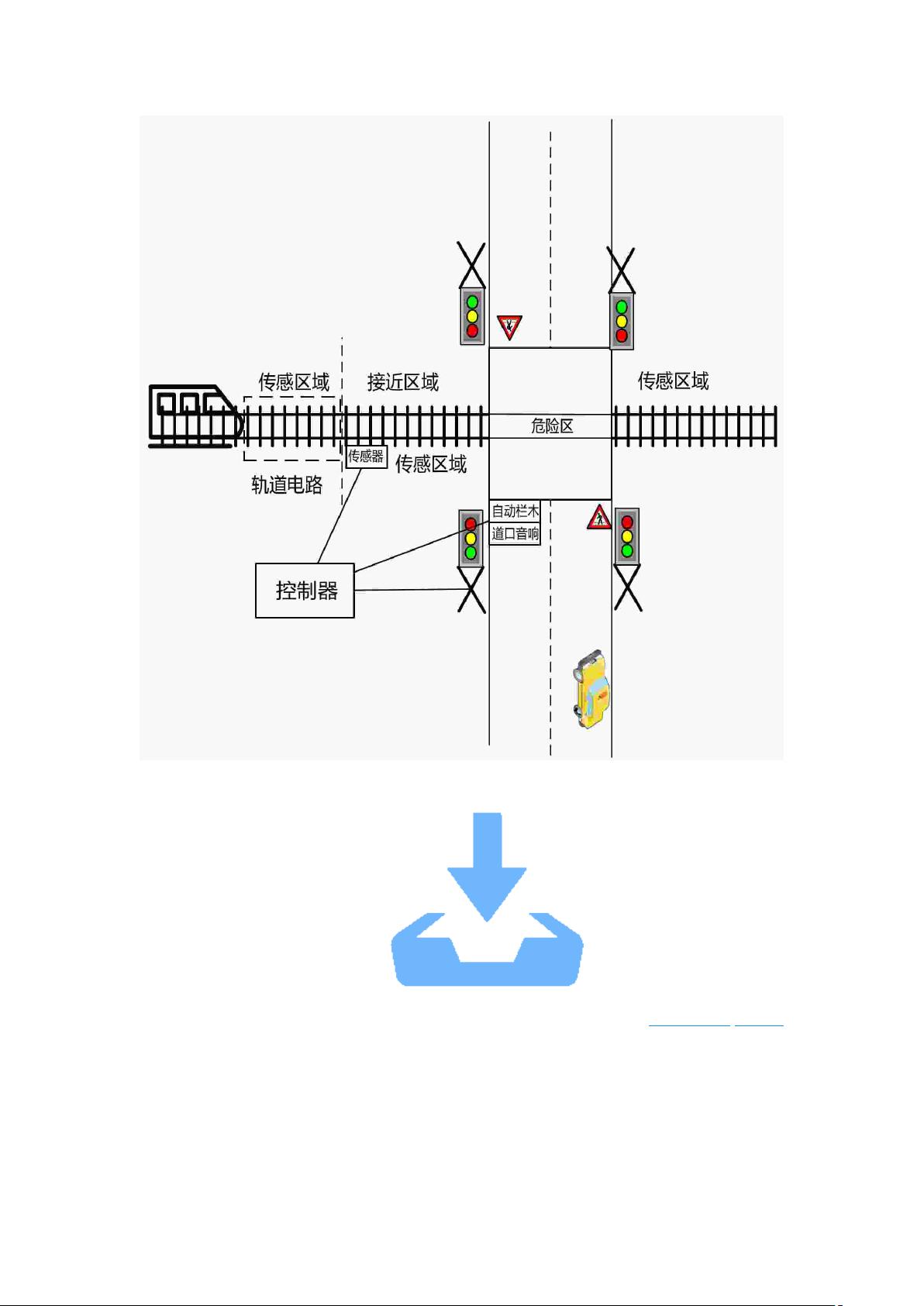
铁路侧信号设备由遮断信号机、联锁单元、传感器和控制器等组成,典型的平交道口
如图 1 所示。图 1 中,传感区域是传感器能检测出列车接近、通过及出清状态的区域;控
制器接受传感器指令,对被控单元进行控制。被控单元包括自动栏木、道口音响和信号机
(道口信号机和遮断信号机)。

剩余12页未读,继续阅读

罗伯特之技术屋
- 粉丝: 4494
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP


相关推荐
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0
最新资源