基于动态清空距离的特殊车辆与CAVs混合车道控制.docx
版权申诉
104 浏览量
2022-11-28
20:31:49
上传
评论
收藏 274KB DOCX 举报


0. 引言
救护车和消防车等应急车辆的畅通和公交车等优先级车辆的通行是道路交通管理的基
本内容
[1-2]
,许多相关控制方法已得到具体工程应用,如针对公交优先的专用道设置方法
[3-
4]
、应急通道设置,以及管控措施
[5-6]
等。这些方法在一定程度上实现了特殊车辆的优先通
行,但也存在一定弊端。一方面,专用道的设置使其他车辆可用道路空间减少,在交通需
求较高时会加剧道路拥堵
[7]
;另一方面,强制换道等控制措施受到技术手段限制,实施难
度大且效果有限
[8]
。因此,如何解决这些问题是提高道路交通管理能力的关键之一。
智能网联车(connected and automated vehicles,CAVs)能通过信息交互实现精细化和
动态化的车道管理策略,为提高道路通行能力、多优先级车辆综合控制提供了技术支持
[9-
10]
。但 CAVs 的发展不是一蹴而就的,Litman
[11]
指出人工车辆(human-driven vehicles,
HVs)与 CAVs 构成的混行交通将在未来较长时间存在。在混行交通中,受 HVs 的干扰,
特殊车辆优先通行在很多情况下无法得到保障
[12]
。对此,赵鑫
[13]
和 Winsor
[14]
提出设置专用
车道方法来排除 HVs 的干扰;Xiao 等
[15]
、刘悠冉
[16]
和 Levin 等
[17]
则改造已有专用道,在不
影响特殊车辆通行的前提下允许部分 CAVs 进入专用道行驶。这些方法既保证了特殊车辆
的优先通行,又提高了专用道的空间利用效率。然而,已有研究集中在保障公交优先通行
的车道控制方法,特别是公交专用道控制方法上,不涉及应急车辆的优先通行,且大部分
研究基于整条路段进行车辆控制,存在一定空间局限性
[18]
。
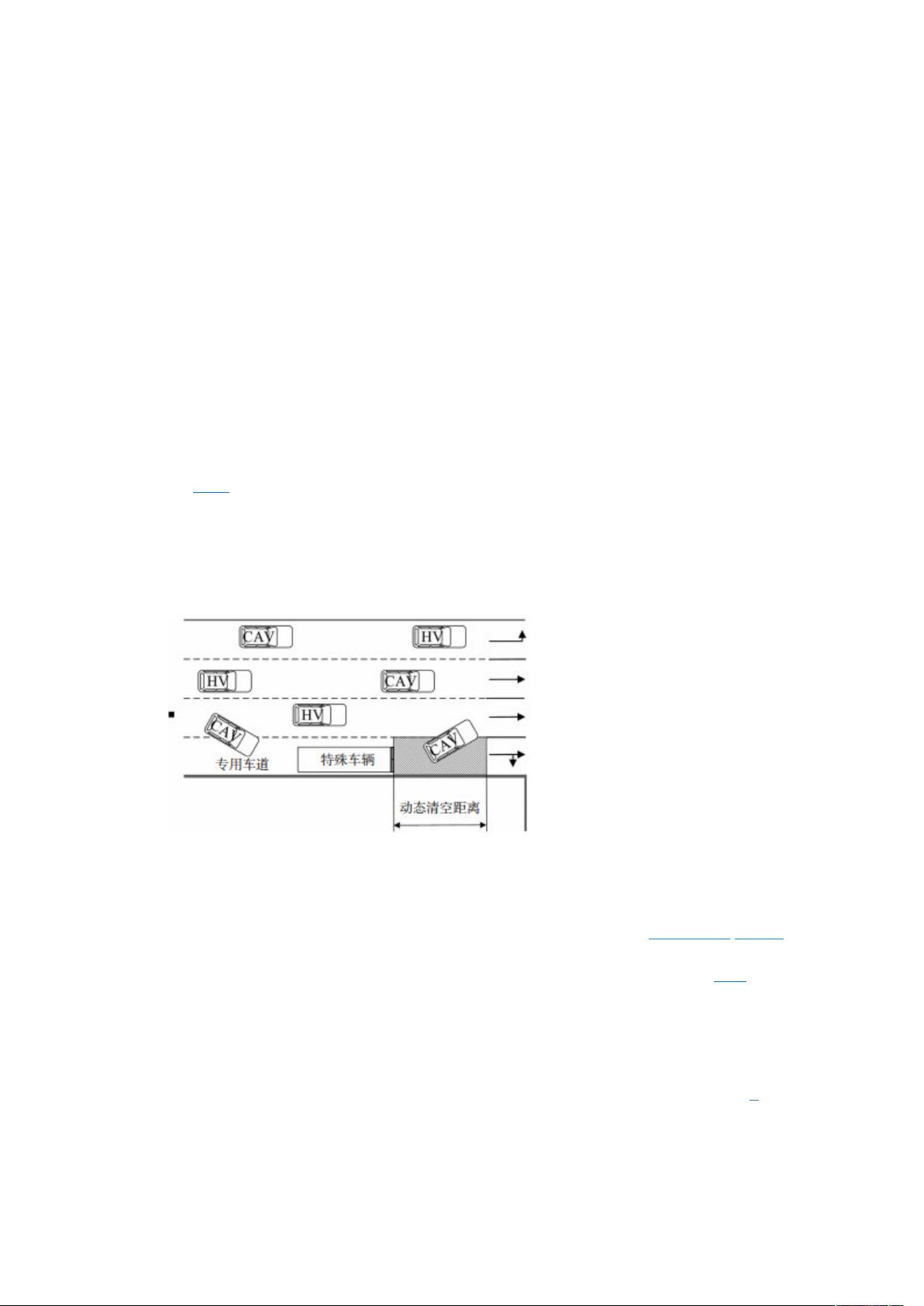
清空距离是车道控制方法中保障特殊车辆优先通行、扩大空间适用范围的关键参数
[18]
。Zyryanov 等
[19]
指出已有的公交专用道控制策略研究经常忽略私家车流量、公交发车频
率和清空距离部署长度对道路整体通行能力及车速提升的影响,但三者的不同组合会获得
不同的实施效果。对此,Wu 等
[20]
针对公交专用道的不同静态清空距离长度在不同交通条
件下的控制效果展开了研究,获得了静态清空距离长度与车流量等交通条件的最佳组合;
Ma 等
[21]
进一步将道路划分为多段长度相等的静态清空区域,通过组合不同数量的清空区
域,在保障公交优先基础上提高了专用道的空间利用率。但在道路混合交通中,Rau 等
[22]
发现静态清空距离受到其特性和适用范围限制,仍然存在车道闲置空间过长或无法完全清
除特殊车辆下游干扰车辆的局限性。为了克服这些限制,Xie 等
[23]
提出在公交专用道上设
置动态清空距离的方案,扩大了清空距离的适用范围。宋现敏等
[24]
提出了 1 种公交专用道
的动态清空距离确定方法,根据公交车到达状态和排队长度动态决策清空距离,有效提高
了公交专用道的空间利用率。然而,考虑到应急车辆不受信号控制和高优先级等特点,现
有动态清空距离模型和设置方案不能直接应用于应急车辆优先通行控制中。
综上所述,目前国内外相关研究多集中于公交专用道的控制方法,仅强调公交车等一
般优先级车辆在空间上的车道控制策略,较少有对应急车辆优先通行问题的讨论,尤其忽
略了应急车辆与公交车等混合行驶时控制策略的动态决策。在车道清空控制方面,现有研
究大部分通过仿真实验设置静态的清空距离,不仅无法满足多优先级特殊车辆的通行需
剩余12页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3651
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











