

0. 引言
随着对位置信息服务(location-based services, LBS)的需求增加,室内环境下的高精度
定位
[1]
成为研究热点。例如盲人室内无障碍导航
[2]
、室内服务机器人自主巡航
[3]
以及室内停
车场中的智能汽车自动泊车
[4]
等室内交通场景,都需要获取目标的高精度位置信息。室内
场景屏蔽了 GNSS(global navigation satellite system)信号,传统的基于 GNSS 的定位方法无
法在室内环境有效应用。对此,国内外学者提出诸多室内定位系统(indoor positioning
system, IPS),但是在定位效率和精度及实用性方面仍然存在很多问题。
目前在室内定位中常用的传感器包括无线传感器、测量传感器和视觉传感器等,其中
使用的无线传感器包括 Wi-Fi
[5, 6]
、蓝牙
[7]
和超宽带(UWB, Ultra Wide Band)
[8]
等,利用室内场
景中广泛存在的 Wi-Fi 资源进行定位是最常见的室内定位方法,王博远等
[9]
提出 1 种改进
的加权 k 近邻 Wi-Fi 指纹定位方法,该方法通过引入加权系数和设计信号加权欧氏距离,
对加权 k 近邻算法进行改进,利用信号加权欧氏距离进行指纹匹配和位置估计,实验中平
均定位误差为 1.82 m。杨保等
[10]
提出 1 种基于蓝牙的室内定位方法,该方法利用不同无线
接入点(access point, AP)对位置的影响差异,实现空间分割以自动构建指纹数据库,结合用
户的运动状态实现室内定位,定位误差小于 2 m。在室内场景中,由于无线信号受到非视
距传播的影响,且单个信号锚点的信号值随时间变化也会发生变化,因此基于 Wi-Fi 或蓝
牙的室内定位算法定位精度较低,且基于指纹的定位方法需要时常对指纹进行更新。而基
于 UWB 的室内定位方法,由于成本高昂,难以进行大规模推广应用。基于测量传感器的
室内定位方法主要使用的传感器包括激光测距仪和陀螺仪等
[11]
,通过测量与周围物体的相
对距离,以及自身的加速度和角加速度等信息,实现自身位置的计算。然而,测量传感器
的成本较高,陀螺仪在无 GPS 环境漂移误差较大,同样难以进行大规模推广应用。
视觉传感器由于其感知数据丰富、直观,价格低廉,且易于集成,基于视觉传感器的
室内定位算法更容易进行推广应用。现有的视觉定位算法按照其过程,可以分为
SLAM(simultaneous localization and mapping)方法和“离线制图-在线定位”方法。ORB-
SLAM3
[12]
是基于图像 ORB(oriented fast and rotated brief)
[13]
特征提取和匹配的视觉 SLAM 方
法,是 ORB-SLAM
[14]
上的改进版本,该方法使用效率较高的 ORB 特征进行特征点的计算
和匹配,然而该方法在构建即时地图时,特征点比较稀疏,在特征点较少的场景中,计算
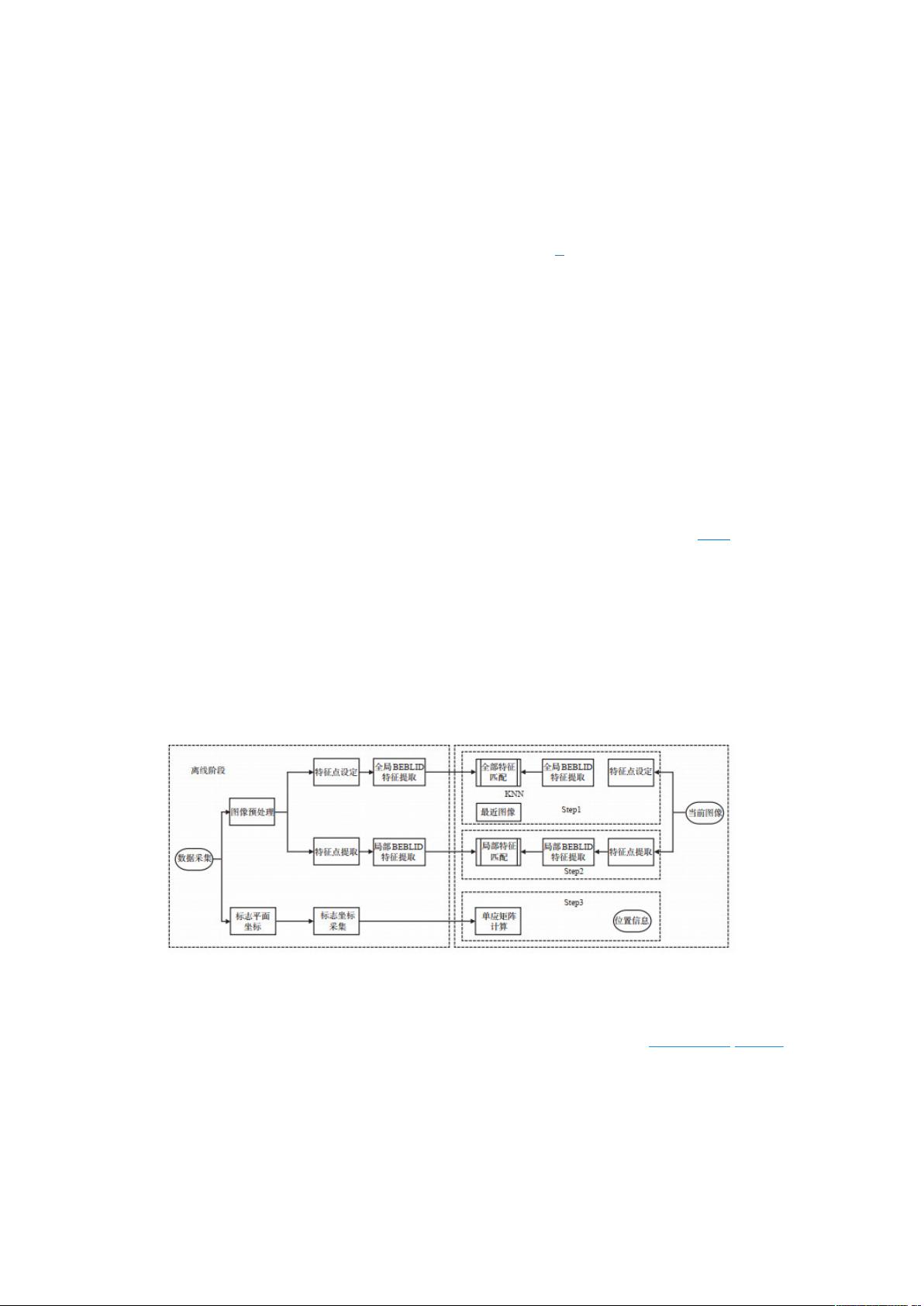
误差较大。“离线制图-在线定位”方法的核心是通过提取和匹配当前图像和地图图像的特征
进而找出最近图像,并在图像匹配结果的基础上进行定位计算。在计算最近图像中,胡月
志等
[15]
提出利用 ORB 特征进行交通标志的快速识别,从构建的交通标志图像库中找出最近
图像。在定位计算中,陶倩文等
[16]
提出利用 SURF(speeded up robust features)
[17]
特征进行场
景特征的提取和计算,然而 SURF 特征的计算比较耗时,导致算法整体的耗时较大。Wael
Elloumi 等
[18]
提出基于 Harris 特征和 ZNCC(zero-normalized cross-correlation)匹配算法的室内
定位方法,该方法需要人工选取室内场景中的关键帧,进行预先地图构建,在定位时,通
剩余10页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4457
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 球谐函数数学的 DirectXMath 扩展.zip
- test157-Baidu2用B4A写的Android小游戏
- 基于FPGA的SD卡音乐播放器工程和设计报告
- 基于MATLAB汉字定位检测识别系统【GUI含界面】.zip
- Delphi7实现RTSP代码部分关键源码和文档.zip
- 基于MATLAB谷物计数源码【含界面GUI】.zip
- 基于MATLAB谷物计数系统【含界面GUI】.zip
- 现代DX11系列教程使用Windows SDK(C++)开发Direct3D 11.x.zip
- 现代 DirectX 11 C++ 游戏引擎.zip
- 全唐诗维护用Delphi操作SQLite数据库正则表达式提取诗句
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


