切换拓扑下时变非线性多智能体系统的一致性.docx
版权申诉
195 浏览量
2022-11-04
16:45:30
上传
评论
收藏 634KB DOCX 举报


0 引言
近年来,随着多智能体系统的协同控制在信息控制
[1]
、编队控制
[2]
、群集运动
[3]
等方面的广泛应用,
已引起越来越多研究人员的关注.其中,一致性问题
[1-4]
作为协同控制的核心问题,更是得到了广泛的关注.
多智能体一致性问题主要是研究多智能体系统中个体之间通过有限的信息交换,使所有智能体的状态达到
某同一值的行为.在实际工程应用中,多智能体之间的信息交换因受到距离、障碍、干扰等多种不确定性
因素的影响,会导致通信链路的中断或重建,使多智能体之间信息交换的准确性降低.通常使用切换拓扑
来描述这种通信链路的改变.常见的切换拓扑有固定时间切换拓扑
[5]
和随机时间切换拓扑,而随机时间切换
拓扑又可分为任意切换拓扑
[6]
、随机切换拓扑
[7]
和马尔可夫切换拓扑,其中马尔可夫切换拓扑包含任意和
随机切换拓扑的特性更具一般性
[8]
.因此,本文研究马尔可夫切换拓扑下多智能体系统的一致性.
目前,针对切换拓扑下线性多智能体一致性已经有诸多研究
[9-12]
.文[9]研究了带有多种噪声干扰的马
尔可夫切换拓扑下的一阶多智能体系统,设计了一致性协议,使系统分别实现均方平均趋同和概率 1 平均
趋同.文[10]研究了当领导者状态为时不变时,马尔可夫切换拓扑下二阶多智能体系统的领导—跟随一致
性.文[11-12]研究了马尔可夫切换拓扑下高阶多智能体系统的一致性问题,并指出系统实现一致性的条件
是联合切换拓扑包含有向生成树.
上述研究都是针对线性系统,然而,自然界中几乎所有的物理系统都是非线性的,比如异步电动机
系统
[13]
、飞控系统
[14]
和电力系统
[15]
,因此,研究非线性多智能体一致性更具应用价值.针对非线性多智能
体一致性的研究也取得了很多成果
[16-22]
.文[16]以一阶非线性系统为研究对象,文[17-18]研究了二阶非线性
系统,事实上,很多物理系统具有高阶性的特点,高阶非线性系统也成为目前的研究热点.文[19]设计了动
态输出一致性协议,研究了无向网络下,一类高阶非线性多智能体系统的领导—跟随一致性.文[20]提出了
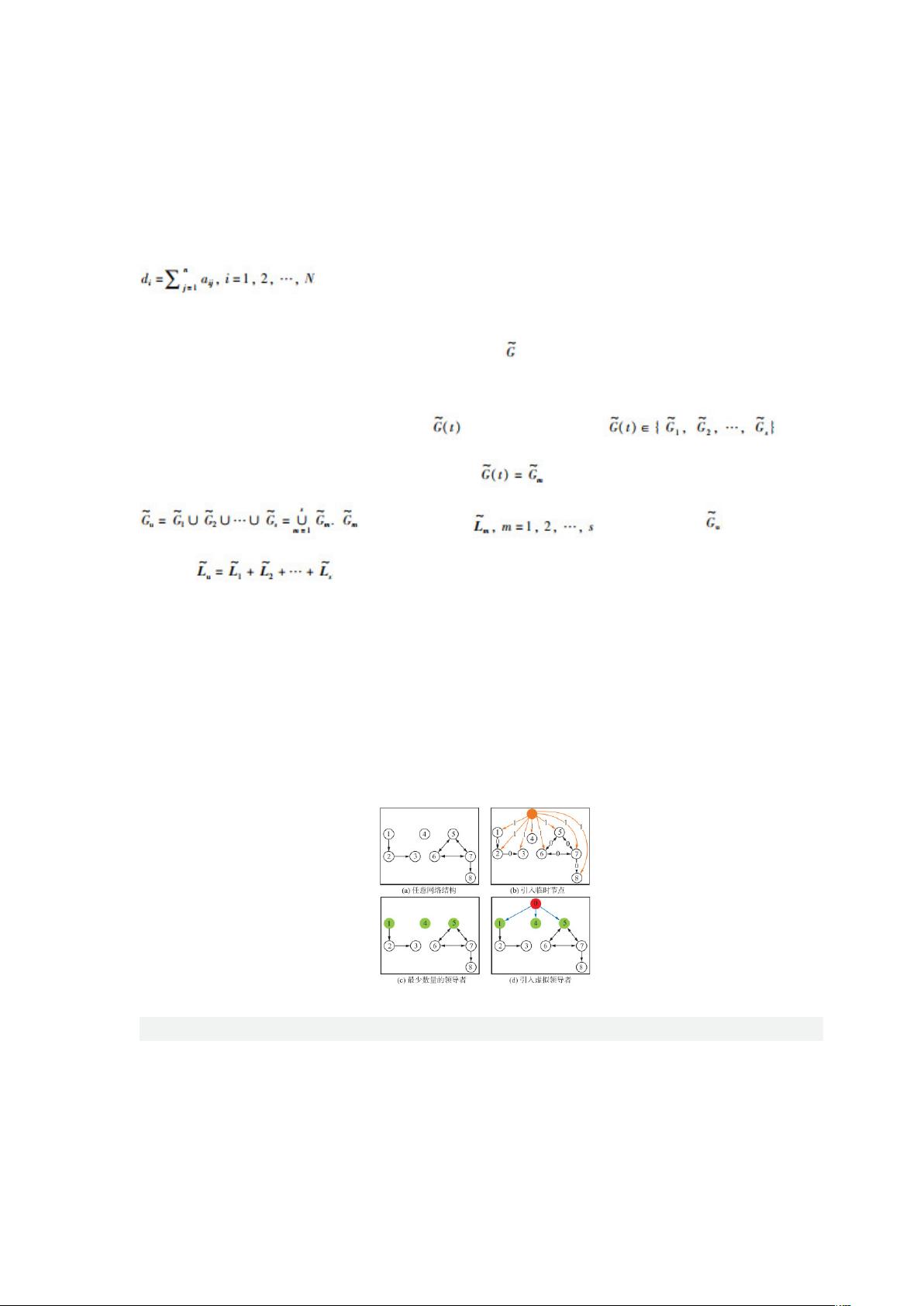
确定有向网络中最小数量领导者的方法,并设计了控制协议保证高阶时变非线性多智能体系统的一致性.
更进一步,为了解决具有不同和未知的非线性多智能体系统的一致性问题,文[21-22]设计了自适应的一致
性协议.与此同时,也需要考虑干扰、拓扑切换等对非线性多智能体一致性的影响.
针对切换拓扑下非线性多智能体一致性也有诸多研究
[23-26]
.文[23]解决了具有通信时延的马尔可夫切
换拓扑下高阶非线性多智能体系统的领导—跟随一致性问题,但其联合切换拓扑是无向连通的.文[24]对切
换拓扑下非线性多智能体系统的领导—跟随一致性进行研究,但要求每个时刻的通信拓扑结构均包含有向
生成树,且只讨论了两个拓扑在固定时间内切换.文[25]放宽了通信拓扑连接的限制,考虑部分时刻的拓扑
结构包含有向生成树.文[26]得出了和线性系统相似的结论,指出实现马尔可夫切换拓扑下非线性多智能体
系统一致性的条件是联合切换拓扑包含有向生成树.文[23]是针对无向通信网络.文[24-25]虽然是针对有向
切换拓扑,但分别要求每一时刻和部分时刻的通信拓扑包含有向生成树.文[26]放宽了限制条件,只需联合
切换拓扑包含有向生成树.分析上述研究成果可知,目前对切换拓扑下非线性多智能体系统一致性的研究
中,仍对联合切换拓扑有限制,至少需要联合切换拓扑包含有向生成树,然而在大规模网络环境中确保网
络的连通性仍是亟待解决的问题.在一般有向切换拓扑结构的通信条件下保证系统的一致性,更具实际意
义.
本文考虑联合切换拓扑是任意有向网络结构,研究了马尔可夫切换拓扑下高阶非线性系统的一致性.
相比于已有的研究成果,本文的创新之处在于:1)本文不需要对通信拓扑进行限制,考虑联合切换拓扑是
任意有向网络结构;2)本文针对马尔可夫切换拓扑下高阶非线性系统设计了具有动态增益的一致性协议.

剩余13页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3553
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











