

0 引言
机械臂抓取作为机器人操作领域中非常复杂而经典的问题,在仓储物流环境下有着广泛的应用潜力.
尤其是在散乱件分拣环节,待分拣商品随机堆叠于料框中,由于未知的物体种类、物体的非常态位姿、物
体间遮挡等因素导致抓取任务不确定性较大,抓取成功率以及速率受限. 与多指机械手
[1-2]
相比,以真空吸
盘作为末端执行器的机械臂在复杂狭窄环境中有更好的运动能力以及更高的效率
[3]
. 然而,针对吸取操作
的相关研究却相对较少.
对于吸取操作,传统研究方法将靠近物体中心的点云与吸盘物理模型进行比对,得出可吸取部分
[4-
5]
. 该类方法的精确程度依赖于真空吸盘这类柔性体物理建模准确程度. 近年来由于人工神经网络的发展,
学者们开始通过深度学习的方法计算吸取点的位置及姿态. 其中最为著名的为 Dex-Net 3.0
[3]
,伯克利学者
在仿真环境中使用 1 500 个物体模型与真空吸盘数学模型进行计算,生成了 2 800 万个点云—吸取标签
对,用于训练一个抓取质量卷积网络. 但是该方法在真实环境中需要高精度摄像机才能够获得较好的应用
效果. Liu 等
[6]
在整幅图像上进行均匀采样,使用卷积神经网络进行吸取点判断,该方法由于计算量大,所
以速度相对缓慢. 而 Zeng 等人
[7]
则采用了全卷积网络的方法直接生成吸取置信度相关的热力图,该方法
的检测速度快,但是数据的获取采用大量的人工标记. 在 2015 年~2017 年亚马逊公司举办的 Amazon
Picking Challenge 比赛中,各参赛队的方案也体现了以深度学习替代传统方法的趋势
[7-9]
.
然而深度学习的方法依赖于人工标签,由于人工对数据进行标记的方法一来较为耗时,二来在复杂
环境下人为判断的准确性难以得到保证,所以自监督采样的方法成为首选. 但是自监督采样的相关文章
[10-
12]
大部分以多指机械手为研究对象,由于多指机械手本身机构复杂、运动解空间大,这就导致在复杂环境
中实验验证场景复杂程度低、训练时间长、抓取成功率低. 文[10]进行了 5 万次抓取尝试,仅用于生成单
独物体的抓取方法;文[12]则为了生成一个柔顺的操作策略共进行了 58 万次的抓取尝试;而文[13]则在 2
500 次抓取尝试之后形成了 80%的抓取成功率.
本文针对物体散乱堆叠的密集环境,将机械臂抓取操作作为研究对象,提出了一个可以用于快速自
监督学习的两阶段物体吸取可供性检测方法. 其中第一阶段的区域预测网络 RE-Net 同时考虑深度信息和
彩色信息,舍弃了单个物体的概念,不受物体间位姿关系的影响,对区域内存在可吸取位置的置信度直接
进行预测. 第二阶段的吸取点检测网络 SGPA-Net 同样融合了深度信息和彩色信息,在选定的区域内选择
最优吸取点. 在自监督学习过程中,RE-Net 依靠 SGPA-Net 自行生成数据,两阶段物体吸取可供性检测
方法能以较快的速度达到较高的检测成功率. 最后,在仿真环境及真实环境中分别进行实验,验证了两阶
段吸取可供性检测方法以及自监督学习方法的有效性,并探究两种环境中进行检测方法迁移的可能.
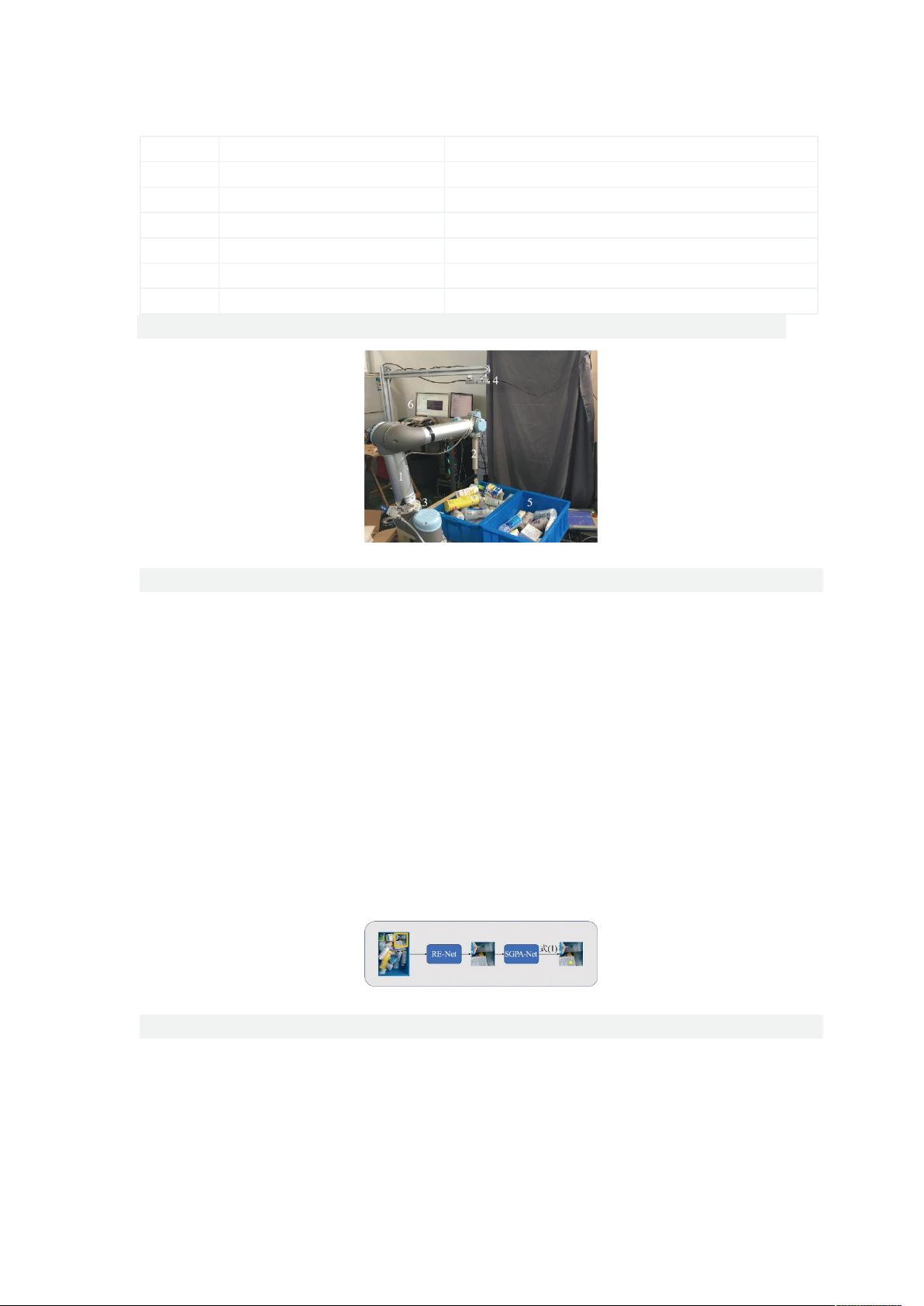
1 系统组成
整个机械臂吸取分拣系统由 UR5 六自由度机械臂、真空吸盘、SMC 空气动力开关、RealSense
D435 RGB-D 摄像头、分拣料框以及 PC(personal computer)组成. 待分拣物体放置于分拣料框中;UR5
机械臂为平台主体,完成分拣过程中的机械运动;真空吸盘通过 3D 打印的圆柱型法兰连接于机械臂末
端;空气动力开关用于检测气路中吸取前后的真空压力差,根据返回信号判断是否有物体被吸附;RGB-
D 摄像头采集彩色图像及深度图像,具体标定方法依据 Tsai Lenz 方法
[14]
进行操作;PC 根据摄像头采集
到的图像,计算吸取点并将位置信息传递给机械臂. 系统组成如表 1 和图 1 所示.

剩余12页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4494
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- C#源码 上位机 联合Visionpro 通用框架开发源码,已应用于多个项目,整套设备程序,可以根据需求编出来,具体Vpp功能自己编 程序包含功能 1.自动设置界面窗体个数及分布 2.照方式以命令触
- 几何物体检测42-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 云计算全套课程资料.zip
- 基于cruise的燃料电池功率跟随仿真,按照丰田氢能源车型搭建,在wltc工况下跟随效果好,最高车速175,最大爬坡30,百公里9s均已实现 1.模型通过cruise simulink联合仿真,策略
- 材料进场验收台账样表.docx
- 建筑材料入库台账样表.docx
- 建筑材料复验台账样表.docx
- 建筑材料台账样表模板.docx
- 建筑材料送检台账样表.docx
- 建筑材料出库台帐模板.docx
- 建筑材料报验单(样表).docx
- 几何物体检测43-YOLO(v5至v9)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 几何物体检测44-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- C++语言实例-毕业设计项目:涂格子游戏开发,图形界面交互特点-开题报告,论文,答辩PPT参考
- python语言kssp批量下载爬虫程序代码QZQ3.txt
- IP102中分离出来的害虫数据集,使用Pasical VOC XML标注
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


