

0 引言
根据国家统计局发布的数据,截止到 2020 年 1 月,我国汽车的保有量已经达到了 2. 6 亿辆,有 10
多个城市的汽车保有量超过 300 万,60 多个城市的汽车保有量达到了百万级别,过大的汽车保有量给城
市交通造成了巨大的压力. 作为高级辅助驾驶系统的一部分,自动泊车辅助(automatic parking
assistant,APA)系统的目的是帮助驾驶员在日益狭小的城市空间内解决停车难的问题,并能有效地解决
城市拥堵和人员的伤亡问题.
APA 通常来说分为 3 大部分
[1]
:环境检测、路径规划和跟踪控制. 针对路径规划的问题,APA 的要
求是快速生成了一条连续光滑且无碰撞的参考路径,光滑要求参考路径的曲率连续,就是要求车辆的前轮
转角变化要连续,不能发生突变. 文[2]利用相切的两段圆弧来设计参考路径,但是设计的路径存在曲率不
连续的问题,在连接点处车辆需要将速度降为零从而进行转向控制. 文[3]提出利用 5 阶多项式来设计参考
路径,虽然解决了参考路径曲率连续的问题,但是没有考虑到周围环境的约束,因此需要较大的泊车空
间. 文[4]针对智能停车系统中存在大量不连通路径的情况,提出了一种改进蚁群算法的智能停车系统路径
规划方法. 虽然该方法能灵活运用于各种不同的环境,但是设计的路径曲率不够连续,车辆的转向不够平
稳,没有考虑到驾驶员的舒适度的要求. 文[5-6]通过规划二次自动平行泊车路径和分析泊车过程中的碰撞
可能性建立了碰撞约束函数,评估最短泊车路径规划出二次平行泊车路径,设计出泊车的合适的区域,但
是计算量较大,路径设计时间较长,需要进一步的优化.
针对跟踪控制的问题,APA 需要控制车辆尽可能地按照参考路径行驶,文[6-9]根据现实环境建立了
相似的仿真环境,通过互动加速学习,设计了新的算法和反馈函数来获得专家知识和筛选数据,建立神经
网络从中学得泊车策略,但是该方法需要大量的实验数据,实验成本太过巨大,需要建立庞大的车联网,
无法普及到家用车辆. 文[10]提出了一种基于样本的运动规划器,由优化双向快速探索随机树
*
和模型预测
控制组成,以正确应对各种停车场景,但是该方法需要采集大量的样本,同时模型预测控制(MPC)算法需
要不断的在线优化,因此对处理器的要求较高,容易受到外界环境的干扰. 文[11-12]提出了一种高精度的
路径跟踪控制器,该控制器遵循一个需要沿着其移动方向发生变化的停车路径. 虽然泊车路径很短,但是
该控制器没有考虑车辆的初始位姿且控制的车辆需要较大的转向角,车辆的速度会在路径的转换点处降为
零,整个泊车过程不连贯.
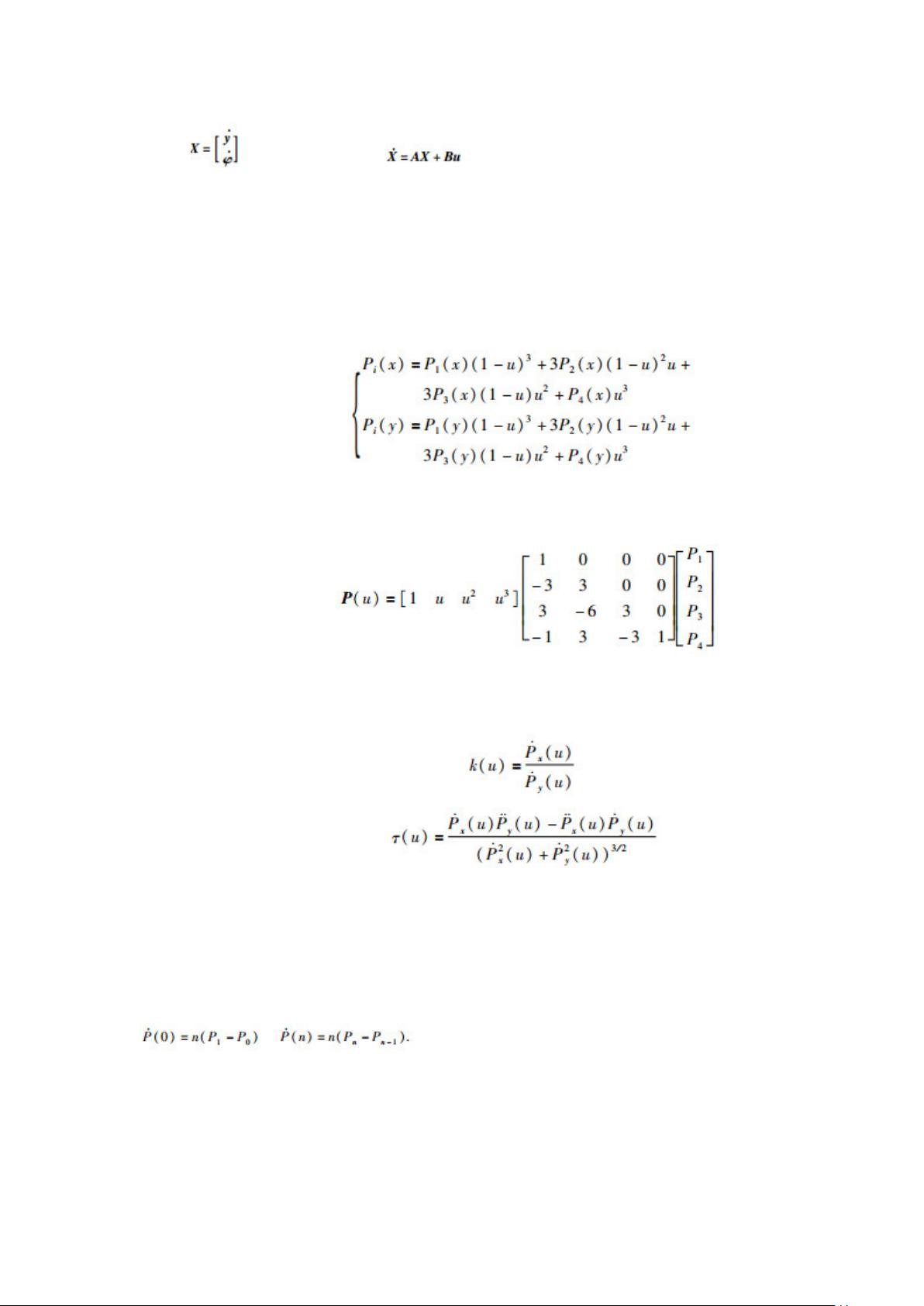
为此,本文针对泊车路径曲率不连续和生成速度较慢等问题,采用逆推法进行参考路径的初步规
划,根据周围环境的约束,通过计算控制点的坐标,结合贝塞尔曲线的性质,选取两段三阶贝塞尔曲线,
规避了高阶贝塞尔曲线局部精度低的缺点,快速拟合出一条曲率连续的无碰撞的参考路径,利用动力学模
型和自然坐标系将车辆运动解耦成横向控制和纵向控制,针对控制器的精度和计算速度不能同时兼容的问
题,采用线性二次规划器(linear quadratic regulator,LQR)作为路径跟踪控制器,离线计算出最优解,再
结合反馈控制,能够快速地求解出最佳前轮转角,来实现良好的路径跟踪效果.
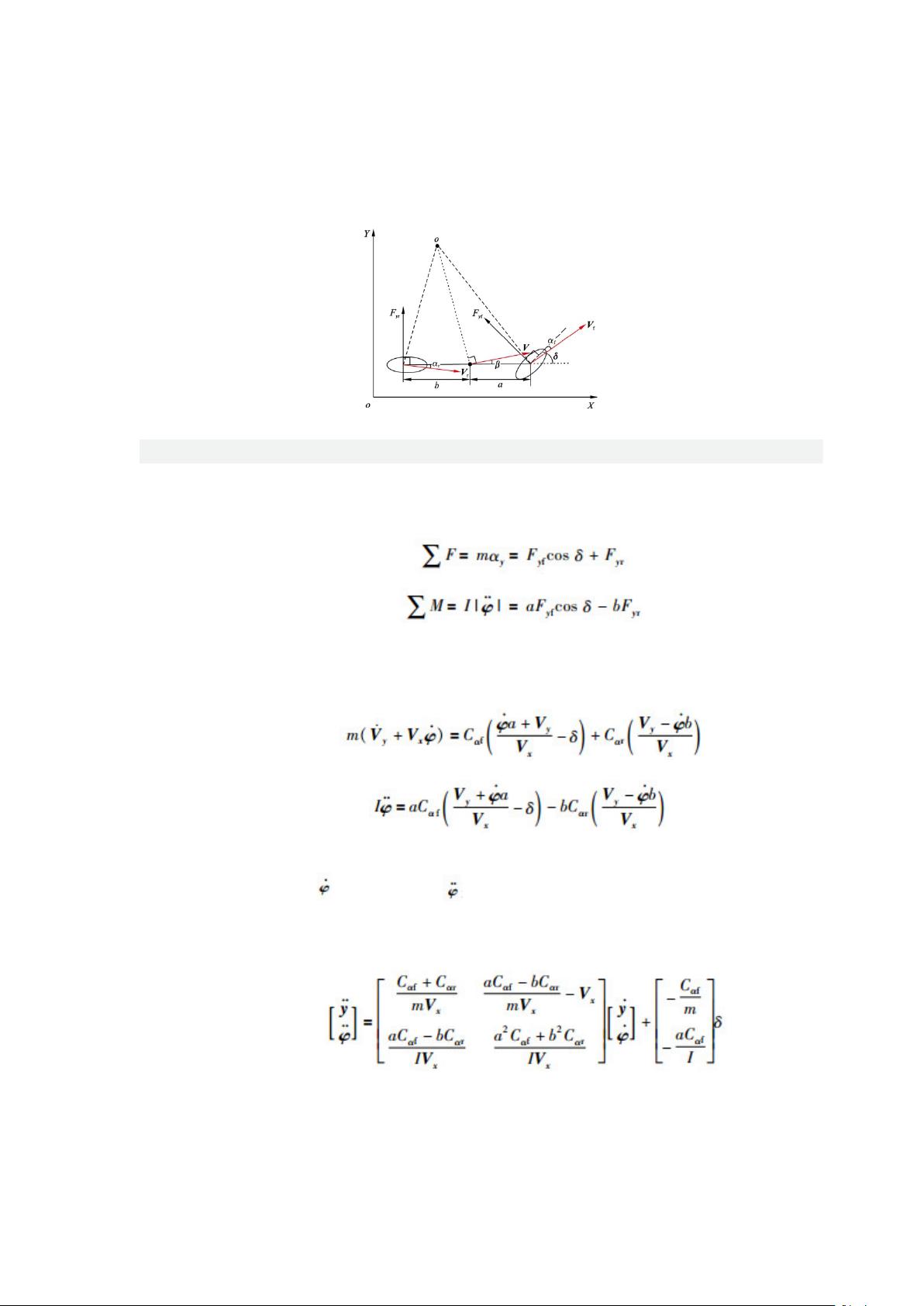
1 车辆的动力学模型
假设车身完全对称,车的轮距忽略不计,车辆的纵向速度 V
x
为常数,可将车身模型简化为 2 自由度
的自行车模型(见图 1),为了得到更加准确的模型,轮胎的侧偏特性不可忽视,因此车轮不可视为刚体,
建立如图 1 所示的车辆动力学模型. 图 1 中的 F
yf
和 F
yr
分别为前轮侧偏力和后轮侧偏力,V
f
和 V
r
分别是
剩余17页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4421
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 图像分割,训练数据集,train-35【train-21~train-40所需积分1分】
- 图像分割,训练数据集,train-34【train-21~train-40所需积分1分】
- 图像分割,训练数据集,train-33【train-21~train-40所需积分1分】
- 图像分割,训练数据集,train-32【train-21~train-40所需积分1分】
- 黑苹果安装工具简单操作
- ManageEngine NetFlow Analyzer
- 微信小程序蓝牙调试项目源码-构建一个蓝牙调试助手应用小程序
- some test code
- some hello code
- (8)字典博客的相关jupyter代码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


