基于模糊PID负荷跟踪型主蒸汽温度控制系统研究.docx
版权申诉
61 浏览量
2022-07-14
11:07:14
上传
评论
收藏 348KB DOCX 举报

在火力发电机组中关于主蒸汽温度的控制具有重要意义。主蒸汽温度是过
热器的出口温度,即汽轮机的入口温度,是整 个 汽 水系统的最高温度,其数值过
高或过低都会威胁机组的运行安全与经济性
[1]
。理论上,主汽温越高,机组的经济
性越好,但过 高会导致汽轮机内部发生热膨胀,降低系统安全性,同时会降低过
热器的使用寿命
[2]
。另一方面,主汽温越低则机组安全性会越好,但过低会使机组
热效率降低,汽耗率增加,降低系统经济性
[3,4]
。因此,必须严格控制主蒸汽温度。
根据实际现场需求,保证机组长期安全经济运行的最大允许偏差≤±5 ℃,瞬时最
大允许偏差≤±10 ℃
[5]
。
由于主蒸汽温度控制系统复杂多变,且被控对象主蒸汽温度具有大惯性、
大延迟、非 线性和时变 性等特点
[3]
,使其控制难度 增加。目前 多采用传统 PID
控制方式。传统 PID 控制器结构简单、易于实现,在一定范围内能够达到良好
的控制效果。但 PID 控制仅适用于精确且结构简单系统的被控对像,对于主汽
温这种模型不精确的时变非线性控制对象,简单的 PID 控制难以达到控制要求。
经研究发现,模糊控制无需知道被控对象的精准模型,其通过采集被控量的多种
信息并根据人的思维和控制经验来制定规则,即使输入量发生一定的变动也不
影响输出结果,更适用于非线性时变对象。
结合模糊控制与 PID 控制各自的优点,本文设计了一种模糊 PID 控制器,
根据被控对象的变化趋势,进行模糊推理,设计模糊规则,决定控制动作,在线调
整 PID 控制器的 3 个参数,得到最佳组合以实现更好的控制效果。另外,对于
锅炉蓄热量少的直流锅炉,如果发电机负荷变化幅度较大,仅用锅炉的蓄热量难
以弥补发电机负荷变化带来的温度影响。因此本文以发电机负荷作为输入,根
据负荷变化进行实时跟踪控制,提升系统稳定性。传统方法采用阶跃信号作为
输入
[6]
,无法体现负荷变化时系统的控制作用,达不到符合跟踪的效果,而本文所
提方法则能体现出过程控制的优越性。本文选取日本中部电力(株)新名古屋火
力发电厂 220 MW 的 4 号机组为实体研究对象。
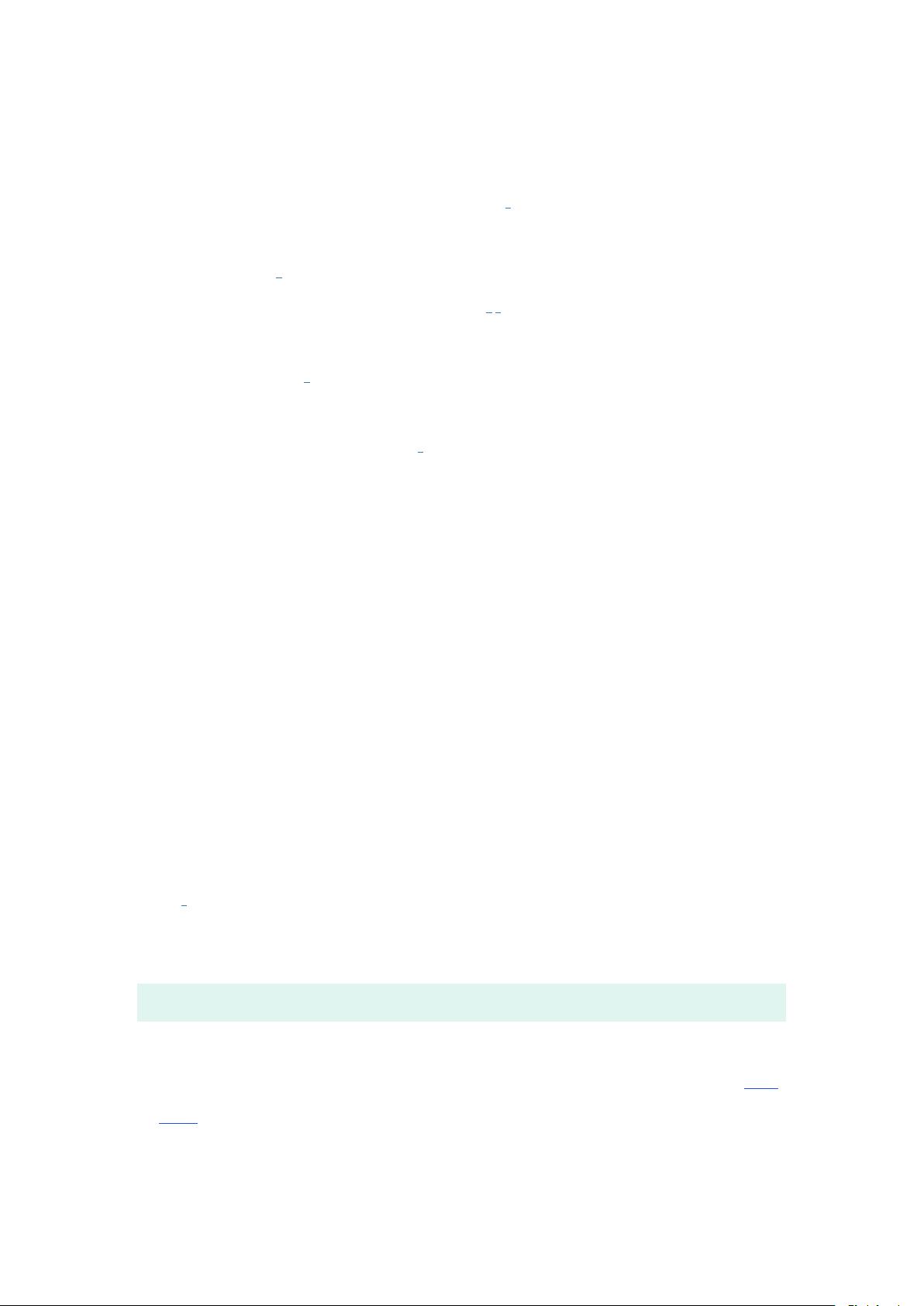
1 主蒸汽 温度控制系统模 型建 立
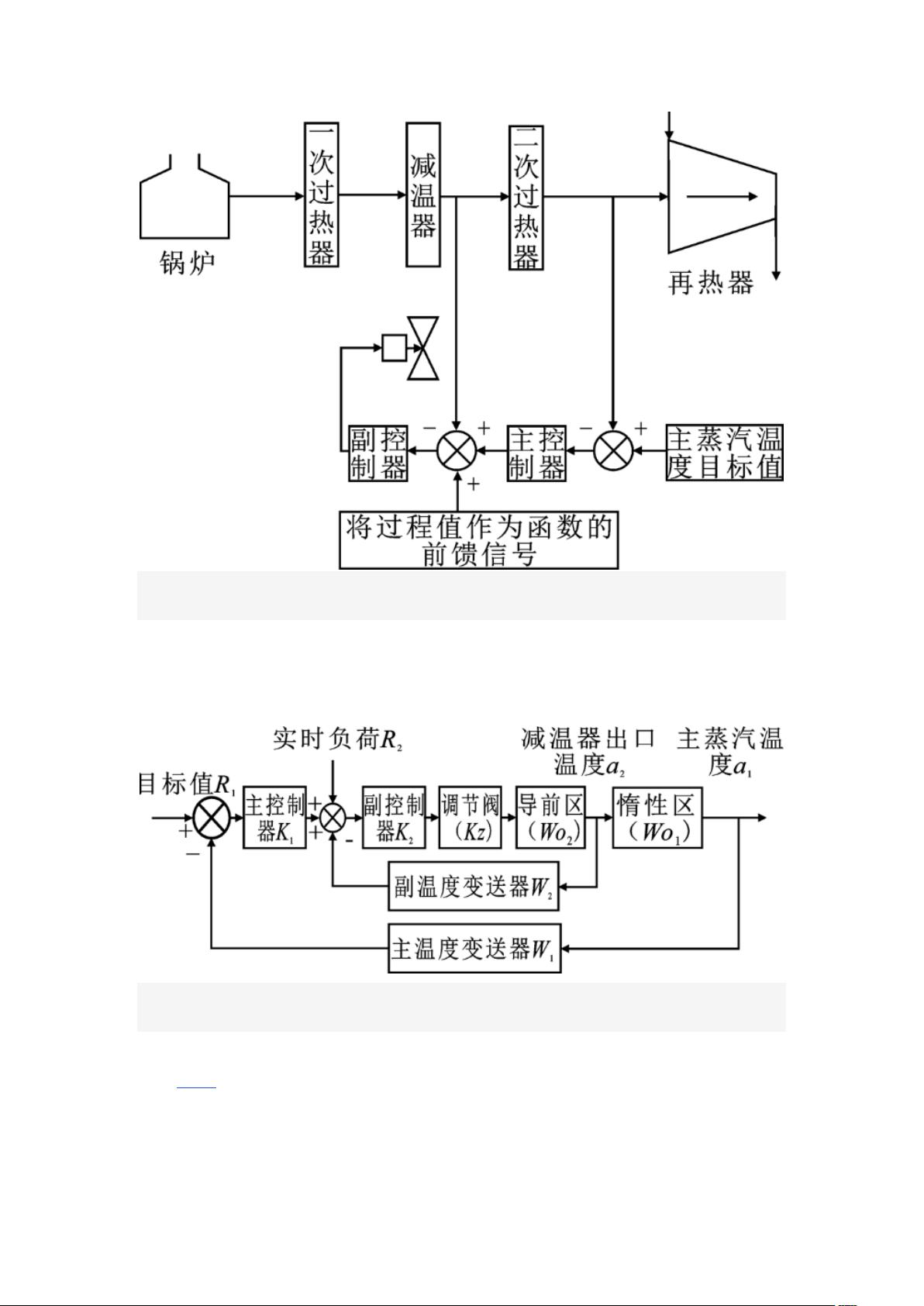
串级控制系统 抗干扰能力强 ,工作频率高,且具有 一定的自适应 能力,故主
蒸汽温度控制系统采用双闭环串级控制系统。其工艺流程图与系统框图如图 1
和图 2 所示。
图 1

剩余13页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4036
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











