

随着物联网技术研究的不断深入,信息的获取愈发便捷,数据传输量也不断
增加。但现阶段通过无线传感网络获取到的原始信息因为信息形式和内容不统
一、信息时空关系不一致、信息精度差异、网络传输不稳定等原因而具有显著
的不确定性
[1]
。此外,由于无线传感网络节点布置相对密集,数据采集频率相对频
繁,采集到的数据在时间上与空间上具有相似性,也会造成大量数据冗余
[2]
,而将
相似和异常数据进行剔除并进行融合处理可提高数据的精确度和稳定性,降低
数据传输频率和数量。
目前已有一系列针对无线传感网络数据融合相关问题的研究。文献[3]利用
归一化方法进行预处理,分析建模后通过最近邻点拓扑目标,选择最佳数据进行
初始化,根据其它数据记录实现数据融合。该方法效果较好,但建模期间需要不
断以大量数据进行调整,无法直接使用。文献[4]通过贝叶斯算法实现测量数据
的数据融合,结合卡尔曼滤波器的贝叶斯融合算法有效解决了数据不确定性和
不一致性的问题。文献[5]提出一种具有预处理的改进型分批估计自适应加权数
据融合算法,根据格罗贝斯准则对单个传感器测量数据序列进行一致性检验,随
后使用改进的分批估计算法对单个传感器计算最优监测值,最后使用自适应加
权进行数据融合。该方法使用格罗贝斯准则进行判断虽然可以较好地实现异常
数据 剔除,但格罗贝斯准则判据是一 个递归算法,每次只能剔除一 个可疑值,效
率不高。文献[6]提出采用自适应加权平均法及 BP 神经网络结合的技术实现环
境监测数据融合。该方法使用 BP 神经网络,较好地提高了数据准确度,但是会
造成网络内信息冗余,增加传输压力。文献[7]提出一种 3 层架构的数据融合系
统,底层采集 原始数据,中间层通过动态贝叶 斯网络处理异构数据 ,上层自 适应
系统动态调整传感器采集。该方法融合结果较好,数据上传不会造成冗余,但网
关层节点需要大量数据集进行训练,节点运算资源消耗较大,不适合长期使用。
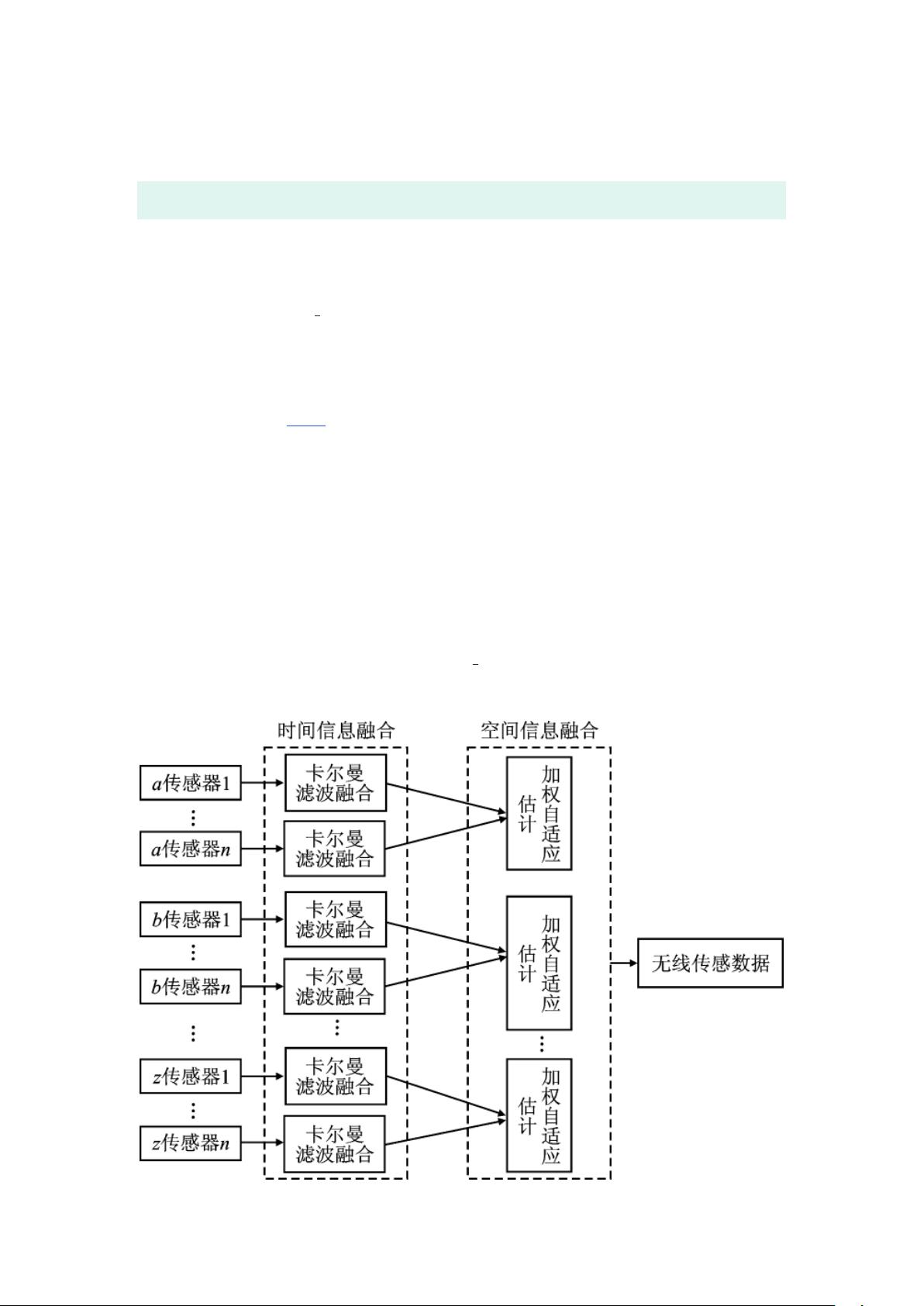
考虑到无线传感网络节点功耗、运算能力的限制,以及数据采集时处理实
时性的要求和数据融合的准确性需求,本文结合时空融合模型提出了一种基于
卡尔曼滤波的时空数据融合方法。该方法将数据融合分为两次,第 1 次对原始
采集到的数据进行预处理,在时间序列上进行卡尔曼滤波融合;第 2 次在网关层
进行数据处理,将空间信息加权融合。基于时间序列的处理可以对数据未来的
趋势进行预判和分析;基于空间的处理则增强了对数据的真实性与可靠性。时
间信息融合中,本研究使用卡尔曼滤波算法处理了动态噪声,对无线传感器节点
的环境噪声做到了实时动态计算和补偿。空间信息融合中,针对不同区域误差

剩余11页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4451
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


