
Adaptive
Cruise
Control
(ACC)
Test
Scenarios
1
1.
COMPILATION SHEET
1.
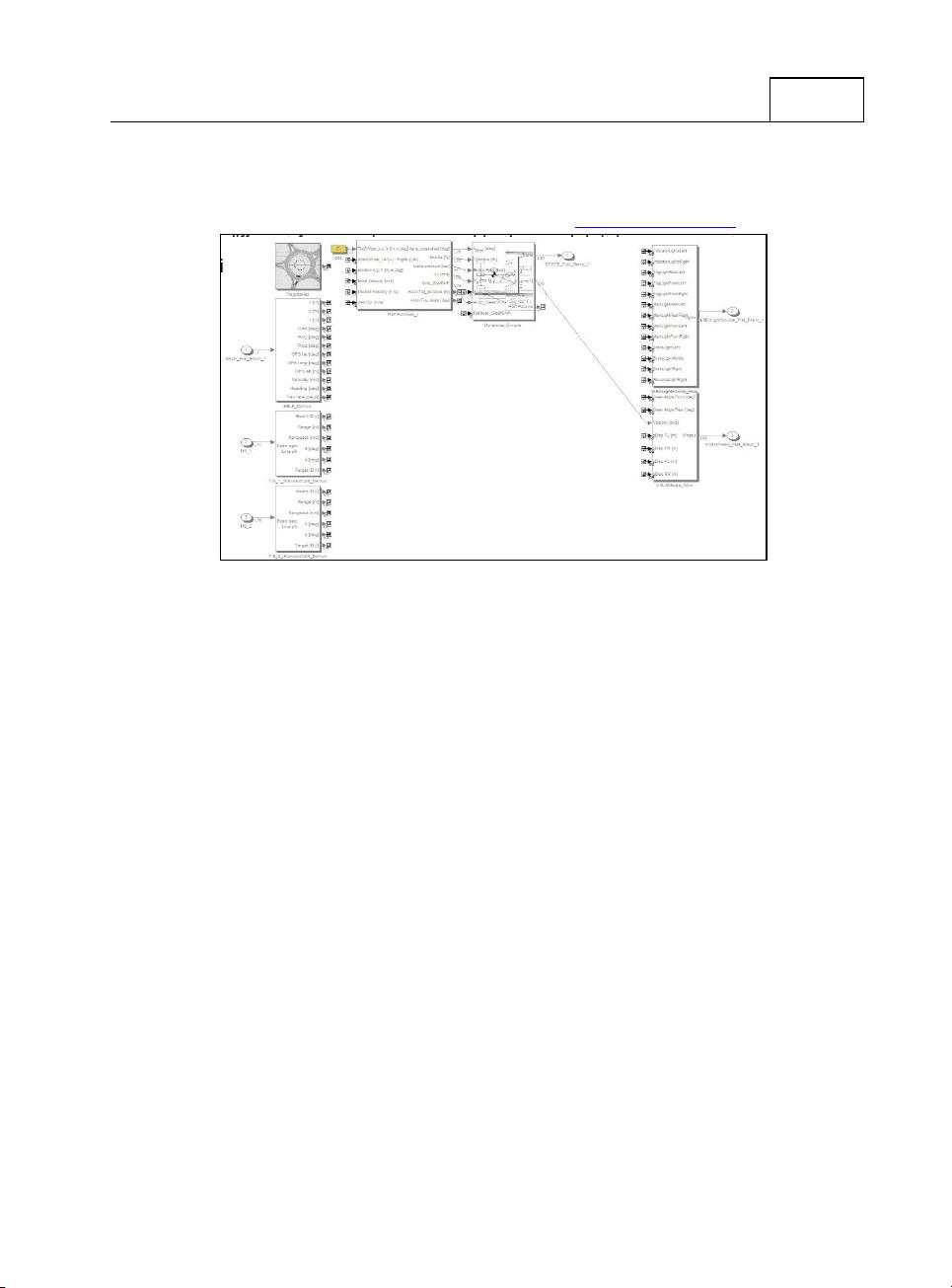
Invoke Simulink and open experiment’s model (Compilation
Sheet ).
Since different frequencies are used in the model, it is necessary to change
“Tasking mode for periodic sample times” to “Single Tasking”.
Host vehicle Compilation Sheet
资源评论


侯高杰
- 粉丝: 0
- 资源: 6









最新资源
- 现场评定检查表——建筑外墙、屋面保温和建筑外墙装饰.docx
- 现场评定检查表--气体灭火系统.docx
- 消防第三方技术服务模拟验收抽查记录表.doc
- 现场评定检查表——总平面布局.docx
- 消防验收过程服务--现场记录表.doc
- 消防第三方技术服务现场交底监督记录表.doc
- 向日葵被控端绿色精简运行版
- 学生心理档案表.docx
- 验收确认单表格.docx
- 阳宅净宅表文.docx
- 医疗废弃物建设项目环境风险简单分析表.docx
- 原材料检测报告.docx
- 造林补助实施方案小班一览表、造林补助(新增部分)分行政村(国有林场)任务落实情况表.xls
- 造林补助(新增部分)分行政村(国有林场)任务落实情况表.docx
- 肢体残疾标准.docx
- 职工工伤与职业病致残等级分级表十级.docx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


