ubuntu18.04视觉智能检测
需积分: 6 145 浏览量
2022-10-14
09:04:48
上传
评论
收藏 73.94MB DOCX 举报


机器人视觉人工智能技术
1 相关知识——基于 yolox 的人工智能检测技术
在 YOLO 诞生之前,目标检测领域热门的深度学习模型是 R-CNN 系列模
型,这一类的模型被称之为二阶段模型(two-stage),其大致思路就是先找出
可能含有物体的区域,进而再细致的找出这片区域内的物体是什么,在哪个位
置。
这一类模型的特点就是准确率较高,但是速度较慢,难以做到实时检测。
而这时候,YOLO V1应运而生,它的特点就是速度快,在牺牲部分模型性能的
情况下,能做到实时检测。
YOLO 直接从图片中去寻找可能存在物体的位置,因此也被称为单阶段模
型(one-stage)。
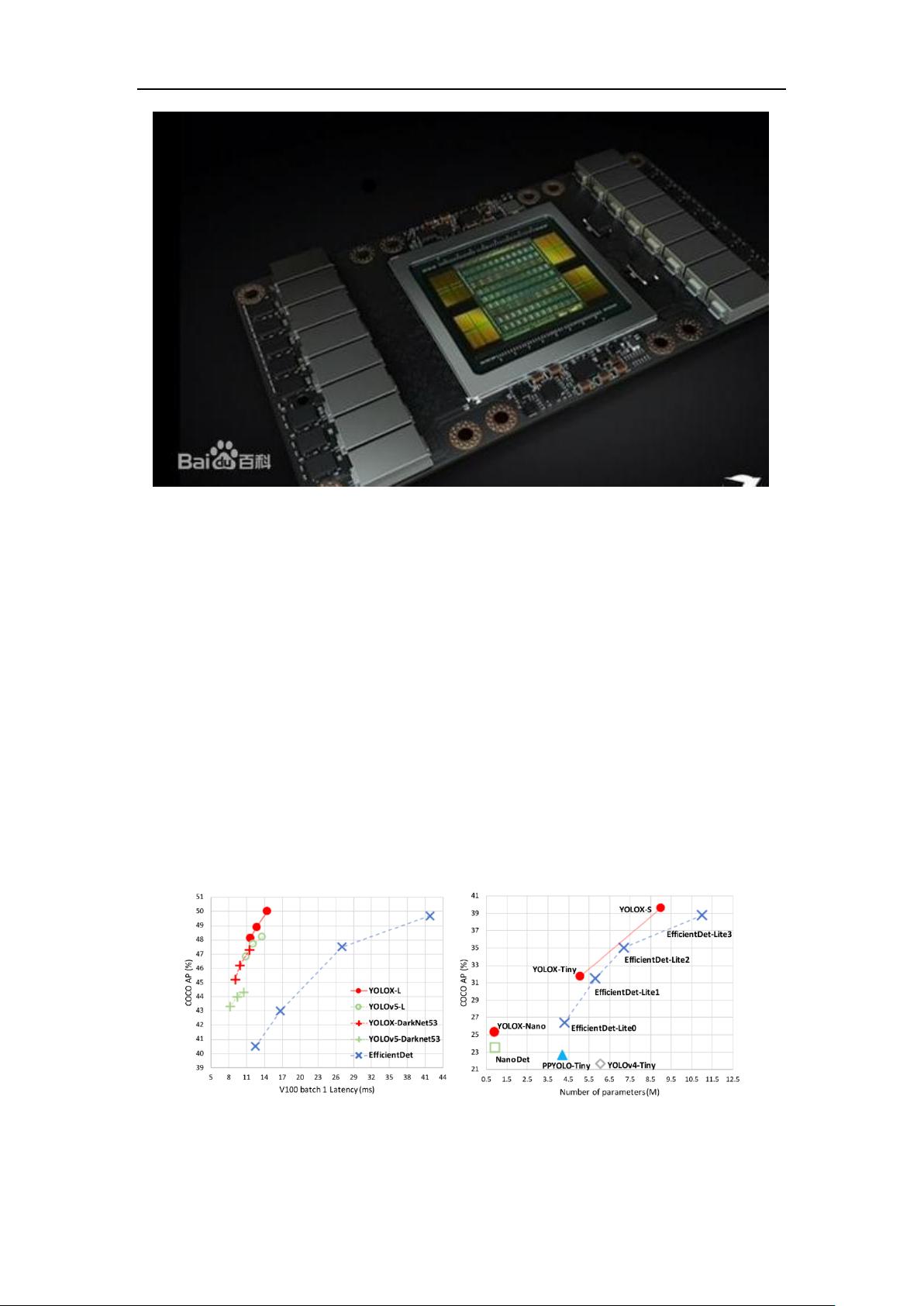
以目前应用较广的 yolox 为例:
(1)YOLOX-L 和 YOLOv4-CSP、YOLOv5-L 有差不多参数量的情况下,
YOLOX-L 在 COCO 上取得 50.0%AP(比 YOLOv5-L 高出 1.8%的 AP),且
YOLOX-L 在单张 Tesla V100 上(TeslaV100 是史上规模最庞大的 GPU,拥有超
过 210 亿个晶体管,是上代 Tesla P100 的 1.37 倍,核心面积达到了创纪录的 815
平方毫米。此外,Tesla V100 还增加与深度学习高度相关的 Tensor 单元。)能
达到 68.9FPS。COCO 数据集、Tesla V100 如图 1、图 2 所示。
图 1 COCO 数据集
剩余32页未读,继续阅读
资源评论


weixin_49698153
- 粉丝: 0
- 资源: 1









最新资源
- 基于python的机械设计实用计算器,可计算电动机,传动装置,V带轮,齿轮,轴,轴承的几何或者力,运动学参数数值+源码+开发文档
- 基于HTML +JavaScript的元旦倒计时代码.docx
- 【Unity资源免费分享】孩子益智小游戏unity 5x系列Baby Doll House Cleaning
- 【资源免费分享】集市游戏(uniyt案例)
- 数据整理结果 2023-12-7 192544 6.dta
- 5.22前端基础(2)
- 糖尿病风险因素分析数据
- matlab项目源码基于matlab的声源定位广义互相关算法的实现.zip
- 基于Go的Dory-Engine应用上云引擎命令行客户端设计源码
- dotnet-core-uninstall-1.7.521001 github上下载下来,从github下载不下来时,可以使用这
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


