





https://gzwelink.taobao.com
字库取模软件 PCtoLCD2002
字库取模软件 PCtoLCD2002 介绍使用
PCtoLCD2002 是专业的取字模软件,采用 C 语言和汇编语言两种格式,支持逐行、逐列、行列、列
行四种取模方式,可以选择字体、大小、文字的长宽,自动生成你想要的字符。
以生成中文字符为例介绍:
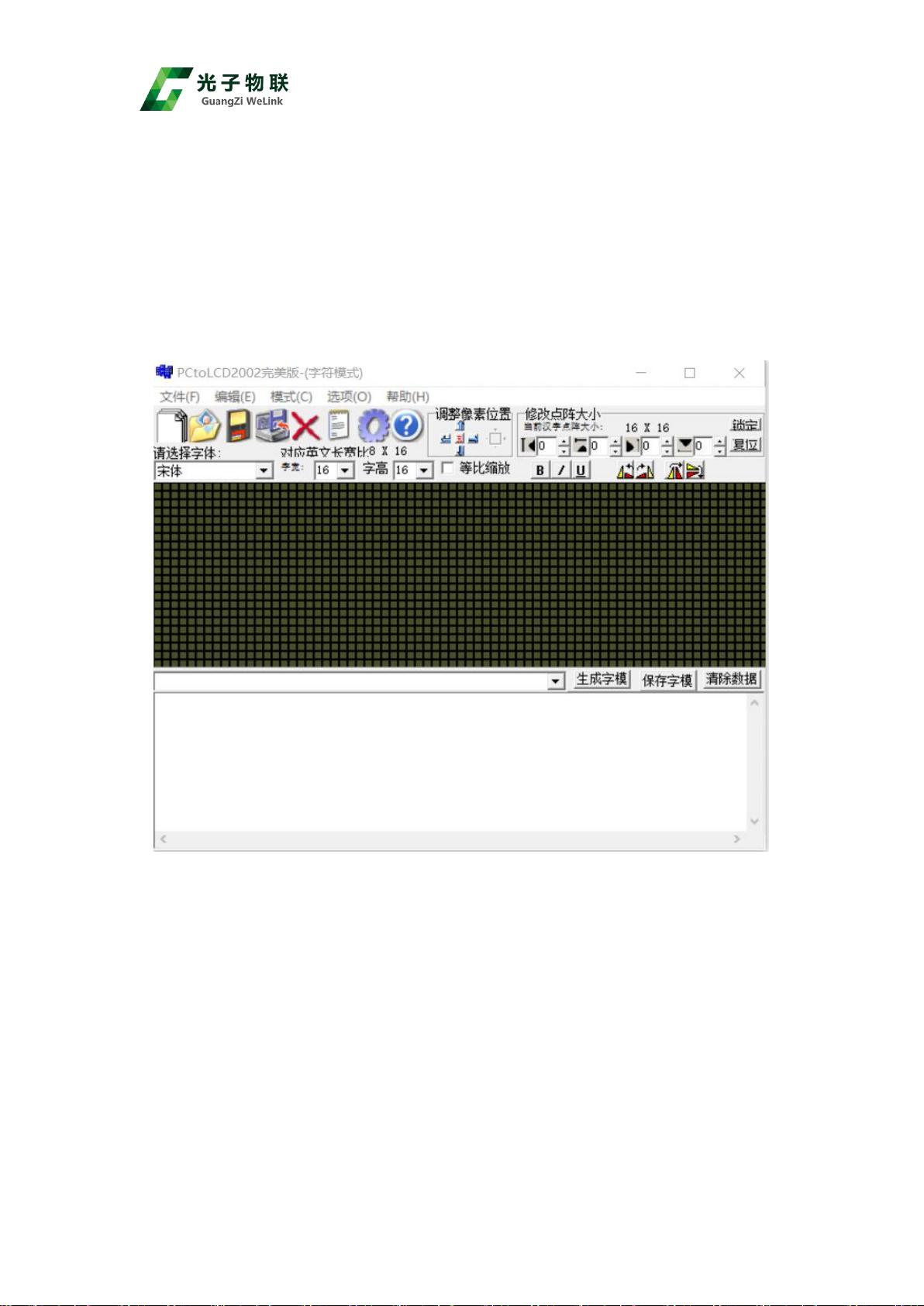
1.1 双击 PCtoLCD2002.exe 打开软件,打开后如图 1.1
图 1.1
1.2 点击选项配置,如图 1.2,配置完参数后点击确定保存,如图 1.3













