**目标检测概述**
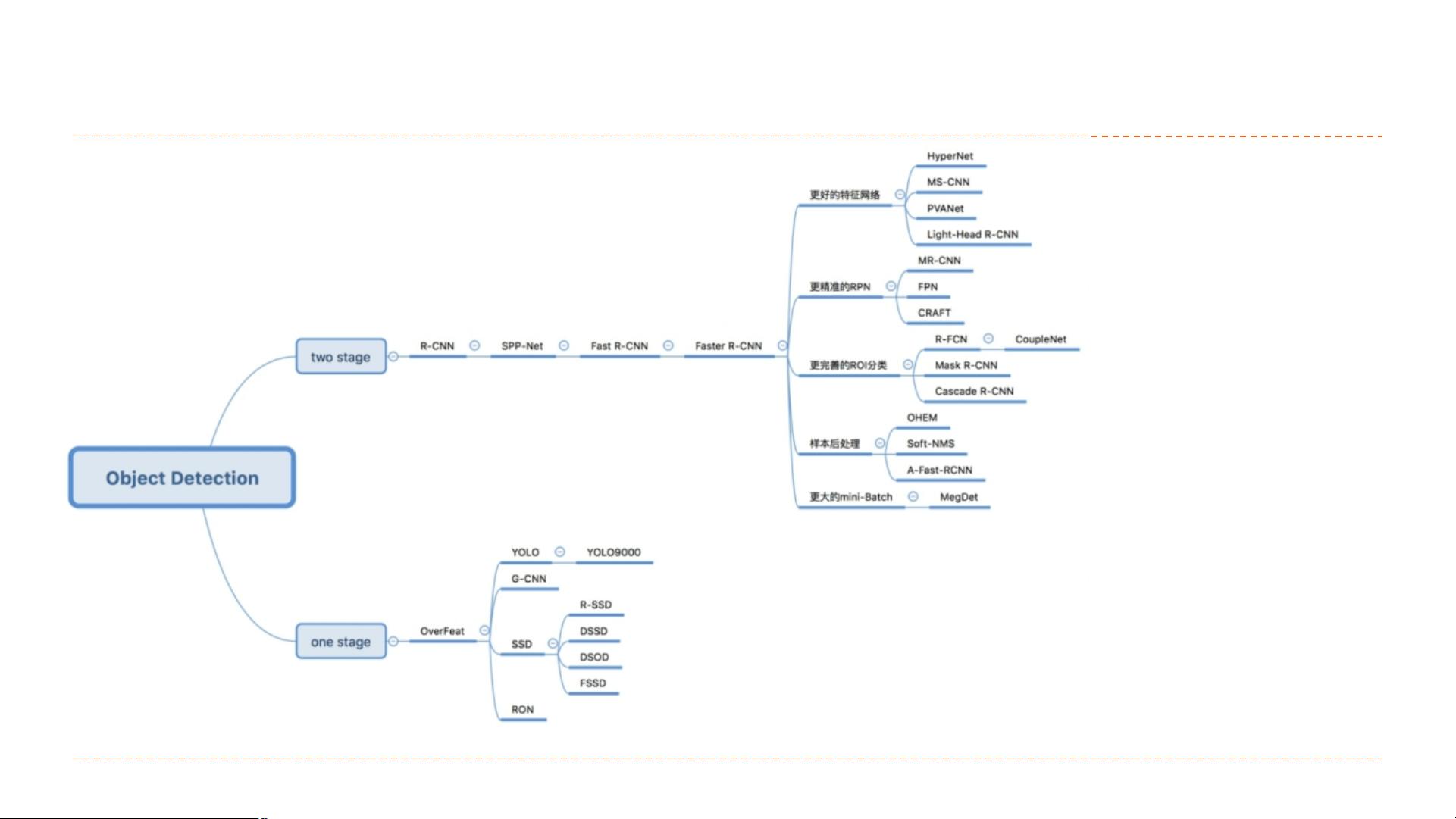
目标检测是计算机视觉领域中的一个重要任务,其目标是识别并定位图像中的特定对象。在深度学习时代,目标检测算法大致分为两类:两阶段(two-stage)和一阶段(one-stage)。两阶段算法如R-CNN系列,先生成候选区域,然后进行分类和细化定位,这类算法通常具有较高的精度,但速度较慢。一阶段算法,例如YOLO(You Only Look Once),则直接预测边界框和类别,速度较快,但在某些情况下可能牺牲一定的精度。
**YOLO算法简介**
YOLO(You Only Look Once)是由Joseph Redmon等人提出的一阶段目标检测算法,它的出现改变了目标检测的速度和效率。YOLO的主要思想是将图像分割成网格,每个网格负责预测几个边界框和它们对应的目标概率,从而实现快速的目标检测。
**YOLOv1**
YOLOv1于2016年发布,它首次提出了一种端到端的检测框架,抛弃了两阶段检测的繁琐步骤。YOLOv1的核心是将图像划分为S*S的网格,每个网格预测B个边界框及其置信度。边界框包含5个预测值:中心坐标x,y,宽度w,高度h,以及与真实框的IoU(Intersection over Union)乘以该网格是否包含物体的概率。非极大值抑制(NMS)用于消除重复的检测结果。网络结构包括24个卷积层和2个全连接层,但它只能处理固定输入尺寸,且对小目标检测效果不佳。
**YOLOv2**
2017年,YOLOv2发布,旨在解决YOLOv1的精度问题。YOLOv2引入了 anchor boxes(预设的边界框比例),提高了定位准确性,同时去掉了一个池化层以增加输出分辨率。此外,它采用了batch normalization加速训练,抛弃了dropout,并使用预训练的CNN模型(在更大的输入尺寸上继续训练)来增强特征提取。YOLOv2还扩展到了能够检测更多的类别,被称为YOLO9000。
**YOLOv3**
YOLOv3带来了Darknet-53作为主干网络,这是一个更深、更宽的网络结构,增强了特征提取能力。它引入了多尺度特征融合,利用不同层次的特征来检测不同大小的目标,并且使用了9种不同比例的先验框。这显著提高了对小目标的检测性能。
**YOLOv4**
YOLOv4在YOLOv3的基础上进一步优化,使用了Mish激活函数,这是一种非饱和激活函数,被认为优于ReLU。此外,YOLOv4引入了一系列技术改进,如SPP-Block(空间金字塔池化)、Path Aggregation Network (PANet)等,这些创新提升了模型的定位和分类能力。
**YOLOv5**
YOLOv5简化了网络结构,提供四种不同的模型规模,适应不同的计算资源需求。它也对主干网络进行了优化,以提高检测速度和精度。
**YOLOX**
YOLOX作为YOLOv5的后续版本,主要贡献在于解耦检测头的设计,分为backbone(主干网络)、decode head(解码头)和post-processing(后处理)。YOLOX探讨了基于anchor的检测头和无anchor的检测策略,并进行了大量实验以优化性能。
**YOLOv6**
YOLOv6的细节未在提供的内容中详细说明,但可以推测它将继续沿用前几代的主干网络优化,并可能在解耦检测头和提高检测性能方面有所突破。
YOLO系列算法通过不断的迭代和优化,不仅提高了目标检测的速度,还在精度上逐步接近两阶段算法,成为实时目标检测的首选方案之一。每一版的更新都带来了新的技术改进,如anchor boxes、多尺度特征融合、更先进的激活函数和网络结构,这些进步推动了整个目标检测领域的发展。




 金山文档2023-07-25这篇文件通过实际案例和图片插图,生动地展示了Yolo算法的应用,为读者提供了实际参考。
金山文档2023-07-25这篇文件通过实际案例和图片插图,生动地展示了Yolo算法的应用,为读者提供了实际参考。 经年哲思2023-07-25这篇文件对Yolo算法进行了综述,内容丰富,让人对Yolov1-Yolov6有了深入了解。
经年哲思2023-07-25这篇文件对Yolo算法进行了综述,内容丰富,让人对Yolov1-Yolov6有了深入了解。 朱王勇2023-07-25这篇文件对Yolo算法进行了全面的总结,从最早的版本到最新的版本都有涉及,使读者能够跟上算法的发展进程。
朱王勇2023-07-25这篇文件对Yolo算法进行了全面的总结,从最早的版本到最新的版本都有涉及,使读者能够跟上算法的发展进程。 刘璐璐璐璐璐2023-07-25作者对Yolo算法的描述详实,对其优势和不足都进行了客观评价,让读者能够全面了解这一算法。
刘璐璐璐璐璐2023-07-25作者对Yolo算法的描述详实,对其优势和不足都进行了客观评价,让读者能够全面了解这一算法。 阿汝娜老师2023-07-25这篇文件清晰地介绍了Yolo算法,既有详细的技术细节,又能让非专业人士易于理解。
阿汝娜老师2023-07-25这篇文件清晰地介绍了Yolo算法,既有详细的技术细节,又能让非专业人士易于理解。











