





永磁直线同步电机的双闭环鲁棒补偿控制
Double Closed-loop Robust Compensation Control for Permanent Magnet Linear
Synchronous Motor
ABSTRACT: For the control system of permanent magnet
linear synchronous motor is susceptible to parameter changes,
transmission delays and external disturbances, a control
scheme is proposed which combining robust compensation
controller and time delay compensator for the double closed-
loop control of current loop and speed loop. The robust
compensation controller is composed of the inverse function of
the first-order reference model, an input term and an integral
term. The system delay compensator uses the inverse system
delay model to compensate for the effect of system
transmission delay. The compound control scheme can reduce
the modeling uncertainty caused by the difference between the
reference model and the unknown real system model, and can
suppress the disturbance caused by dq axis coupling effect,
friction and transmission delay. The control scheme has a
simple structure, the output of the system in steady state is
equal to the input, and there is no need to combine other
control algorithms. Finally, the simulation and experimental
results verify that the scheme can effectively suppress the
influence of load and external disturbance on the speed control
system, resulting in good stability and robustness of the
system.
KEYWAYS: permanent magnet linear synchronous motor;
cascade control; double closed-loop; robust control;
transmission delay
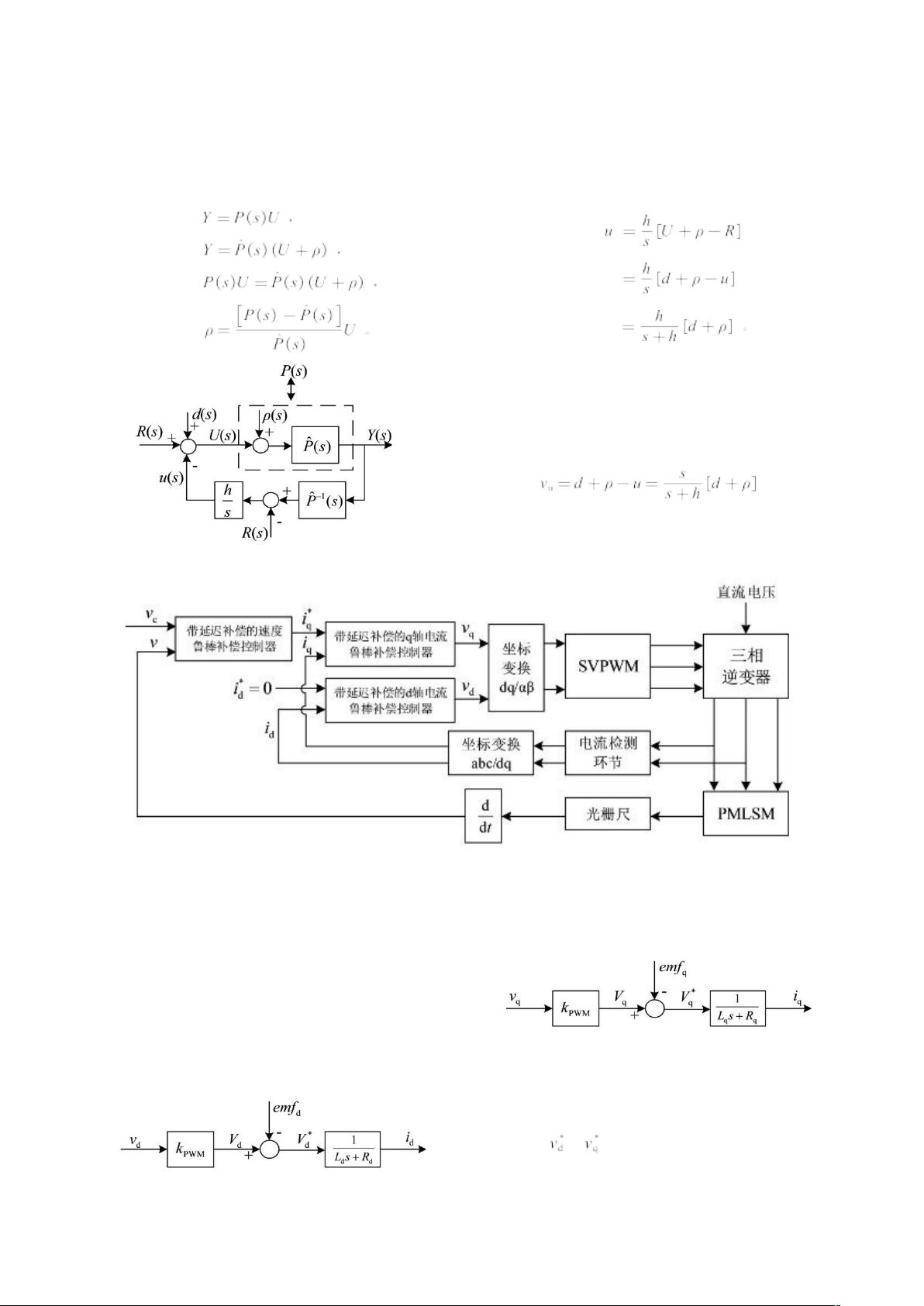
摘要:针对永磁直线同步电机的控制系统易受参
数变化、传输延迟及外部扰动影响的问题,提出
一种鲁棒补偿控制器和时间延迟补偿器相结合的
控制方案用于电流环和速度环的双闭环控制。鲁
棒补偿控制器由一阶参考模型的逆函数、一个输
入项和一个积分项组成。系统延迟补偿器采用逆
系统延迟模型来补偿系统传输延迟效应。该复合
控制方案可以减少由于参考模型与未知实际系统
模型不同而引起的建模不确定性,并可以抑制 dq
轴耦合效应、摩擦力、传输延迟等因素引起的扰
动。该控制方案结构简单,系统稳态时的输出等
于输入,无需结合其它控制算法。最后,仿真和
实验结果验证了该方案可以有效地抑制负载及外
部扰动对速度控制系统的影响,使系统具有良好
的稳定性和鲁棒性。
关键词:永磁直线同步电机;级联控制;双闭环 ;
鲁棒控制;传输延迟
0 引言
永磁直线同步电机(Permanent Magnet Linear
Synchronous Motor, PMLSM)直接输出直线推力,
完全摆脱了传动转换与反向间隙问题,具有加速
度大,运动定位准,输出推力大等优点
[1]
,因此
PMLSM 正越来越多地被用作自动化控制领域的
执行器。然而,PMLSM 也存在对内外部扰动较
敏感的问题,其轨迹跟踪过程易受建模误差、传
输时延、外部扰动等因素的影响,并且由于直线
电机所采用的直接驱动方式会严重降低速度伺服
系统的跟踪精度。因此,为了抑制内部及外部扰
动对系统的影响,从而提高 PMLSM 的速度跟踪
精度是本文研究的主要内容。
PMLSM 系统的电流控制性能受电流系统参
数和反电动势等因素影响,实际系统的建模误差 、
非线性扰动和摩擦阻力会降低速度控制的性能,
因此传统的 PID 控制方式难以达到高速、高精度
的控制目标。采用鲁棒控制抑制直线电机运行过
程中的各种非线性扰动是目前研究的方向之一
[3]
。文献[4]提出一种利用扰动观测器和重复控制
器抑制齿槽效应与边端效应的鲁棒控制方法,利
用扰动观测器可以实现对动子参数变化、外部周
期扰动以及不确定摩擦扰动等因素的实时补偿,
利用内模控制原理设计的重复控制器可以抑制齿
槽效应和周期性推力波动对系统的不利影响,但
采用扰动观测器消除未知扰动需要与线性反馈控
制器或其它控制算法相结合来构成控制系统。文
献[5]针对 PMLSM 参数变化和外部负载扰动难以
控制的问题,提出 PMLSM 伺服系统的全局鲁棒
终端滑模控制,利用改进的超螺旋算法设计滑模
面函数并推导鲁棒滑模控制律,然而交直轴的耦
合问题和传输延迟依然使控制系统出现了超调和
震荡的现象;文献[6]为了提高 PMLSM 电流环的
暂态特性,提出一种引入修正因子的改进型预测














评论0