卫星定位导航系统及其应用-期末复习精华版.pdf
版权申诉

卫星定位导航系统(
GNSS
)
:
以导航定位卫星发射的信号
来确定载体位置而进行导航的系统。
GPS 系统的特点: 第一,全球地面连续覆盖 第二,功能
多,精度高(C/A 码,P 码) 第三,实时定位
GPS
设计中计划提供两种服务: 一种为 精密定位服务
(
PPS
),利用
P
码进行定位,只提供给本国及其盟国的军
方和得到特许的民间用户使用,估计其定位精度为 10m。
另一种为标准定位服务
(SPS)
,利用
C/A
码定位,提供给
民间用户使用。由于
C/A
码作为捕获
P
码之前的前导码,
是一种粗捕获的明码,因此估计 SPS的定位精度约为 400m。
美国政府的 GPS 政策:但 GPS 试验卫星阶段的多次试验
结果表明,实际定位精度远远高于预测值。利用
C/A
码的
定位精度可达 14m,利用 P 码的定位精度可达 3m。
因此美国 1984 年确立了保护国家安全的两大政策:
SA(Selective Availability) 政策 : 降低 C/A 码 定位精 度。
(1989 年在轨 GPS 卫星停止服务两周进行高频振动的 SA
验证,
1990.3-8
月间更长时间进行
SA
技术验证)
AS (Anti-Spoofing)政策:即防止敌对势力对 P 码信号进
行干扰。
GPS
的发展目标:美国政府还希望在
21
世纪内将导航系
统全面向基于空间技术的系统转变,为此,需要增强
GPS
的性能,如提高可靠性和精确性,扩大覆盖面积,增强信
号强度等。
措施一,增加在轨卫星数目,由最初的
21
+
3
颗增加到
30 颗,保证地球上任何一点接收到的卫星数不少于 5 颗,
覆盖面积扩大到南北极、丛林地区以及 2 倍的地球同步
轨道高度的空间;
措施二,加载第二民用
C
/
A
码和增设第三民用频率。
措施三,加强建立民用广域差分系统
WAAS
和军用差分增
强系统 WAGE。
GPS 全球定位系统的组成:GPS 系统由三部分组成
空间部分;
6 个轨道面 平均轨道高度 20200km 轨道倾角 55 周期
11h 58min(地球-卫星的几何关系每天提前 4min 重复一
次)
作用:接收、存储导航电文;生成用于导航定位的信号(测
距码、载波);发送用于导航定位的信号(采用双相调制
法调制在载波上的测距码和导航电文);接受地面指令,
进行相应操作;其他特殊用途,如通讯、监测核暴等。
主要设备:太阳能电池板;原子钟(铯钟、铷钟);信号
生成与发射装置;
地面控制部分;
组成:主控站:1 个;监测站:5 个;注入站:3 个;通
讯与辅助系统
监测站(5 个)
作用:接收卫星数据,采集气象信息,并将所收集到的数
据传送给主控站。
地点:夏威夷、主控站及三个注入站。
主控站(
1
个)
作用:管理、协调地面监控系统各部分的工作,;收集各
监测站的数据,编制导航电文,送往注入站将卫星星历注
入卫星,;监控卫星状态,向卫星发送控制指令;;卫星维
护与异常情况的处理。
地点:美国科罗拉多州法尔孔空军基地。
注入站(
3
个)
作用:将导航电文注入
GPS
卫星。
地点:阿松森群岛(大西洋)、迪戈加西亚(印度洋)和
卡瓦加兰(太平洋)
用户设备部分
组成:用户;接收设备
接收设备:
GPS
信号接收机;其它仪器设备
GPS 信号接收机:天线单元;带前置放大器;接收天线;
接收单元;信号通道;存储器;微处理器;输入输出设备;
电源
———————————二————————————
地球坐标系:经常用到的地球坐标系有两种:一种是空间
直角坐标系,另一种是大地坐标系。
空间直角坐标的优点是:它不涉及参考椭球体的概念,而
且在求两点之间的距离和方向时,计算公式十分简单。但
其表示点位不够直观,不容易在地图上直接标出。
地图投影及投影变形:将某点的纬度 B 和经度 L 换算为地
图坐标
X
和
Y
,称为地图投影。
x=F1(B
,
L)
;
y=F2(B
,
L)
由于椭球面是一个曲面,我们不可能把它铺展成一个
平面而不产生某种褶皱和破裂,也就是不可能把整个椭球
面或其一部分曲面毫无变形地表示在一个平面上,因此无
论对投影函数
F1
和
F2
选得如何妥当,总是不可避免地产
生变形。
地图投影的分类:
按其变形性质分:
等角投影:投影后,地图上任意两相交短线之间的夹角保
持不变。等面积投影:投影后,地图上面积大小保持正确
的比例关系。等距投影:投影后,地图上从某一中心点到
其它点的距离保持不变。方位投影:投影后,地图上表示
的任一点到某一中心点的方位角保持不变。
按投影面分:
平面:平面与椭球面在某一点相切;圆锥面:圆锥体面与
椭球在某一纬圈相切,或两纬圈相割;圆柱面:圆柱面/
椭圆柱面与椭球在赤道上或某一子午圈上相切。
按中心轴线分:
正轴投影:轴与椭球的短轴相合;横轴投影:赤道面上,
与椭球短轴正交;斜轴投影:轴位于上述两种位置之间。
高斯投影
:
目前,中国、德国以及俄罗斯等国家均采用此
投影。为横轴、椭圆柱面、等角(正形)投影。
轴子午线上没有长度变形,其他都有长度变形。并且其变
形大小,将与点的横坐标 y 的平方成比例,距离轴子午线
越远,变形就越大。
UTM
投影
:
其归属于高斯投影族,其基本条件为:
(1)正形(等角)投影。
(2)经度的起点为零子午线,纬度的起点为赤道。
UTM
投影在整个投影带内的长度变形较均匀,比高斯投
影 的 长 度 变 形 小 , 其 计 算 可 通 过 高 斯 坐 标 获 得 :
XU=0.9996x, YU=0.9996y 。
大地坐标系:
WGS-84 世界大地坐标系(World Geodetic System)是由美国
国防制图局
(defence mapping agency
,
DMA)
建立的一种协
议地球坐标系,是
GPS
卫星导航定位的测量成果,于
1987
年 1 月 10 日开始采用。WGS84 系是目前最高精度水平的
全球大地测量参考系统。
PE-90
系从
1993
年
8
月起,
GLONASS
开始采用
1990
年地
球参数系统 PE-90(前苏联 PZ-90)发送星历数据。PE-90
类似于 GPS 所用的 WGS-84 的地球模型,其短半轴为:
6378136
,扁率为:
298.25784
。 虽然
PE-90
在全球范围
内拟合的总体效果比 WGS-84 略差,但是在前苏联区域地
球表面的拟合效果要优于 WGS-84
国家 2000 系根据《中华人民共和国测绘法》,我国自 2008
年 7 月 1 日起启用 2000 国家大地坐标系,过渡期为 8-10
年。我国北斗卫星导航系统即应用此坐标系。
坐标变换
——————————三————————————
GPS 卫星信号结构:GPS 信号是 GPS 卫星向广大用户发送
的用于导航定位的已调波,其调制波是卫星导航电文和测
距码的组合码。
卫星发射的导航信号包含:卫星星历及卫星钟校正参量;
测距时间标记,大气附加延时校正参量;以及与导航有关
的其他信息。
GPS 卫星信号的组成部分:1、载波(Carrier):L1、L2
2、测距码(Ranging Code):C/A 码(目前只被调制在 L1
上)、P(Y)码(被分别调制在 L1 和 L2 上);3、卫星(导航)
电文(
Message
)
GPS 卫星信号的生成:关键设备 – 原子钟
GPS 卫星的基准频率 f0,由卫星上的原子钟直接产生
频率为
10.23MHz
。卫星信号的所有成分均是该基准频率
的倍频或分频
GPS 卫星信号结构---载波:作用:1、搭载其它调制信号
2
、测距
3
、 测定多普勒频移
类型: 目前:
L1 –
频率:
154 f0 = 1575.43MHz
;波长:
19.03cm
L2 –
频率:
120 f0 = 1227.60MHz
;波长:
24.42cm
现代化后:
增加 L5 – 频率:115 f0 = 1176.45MHz;波长:25.48cm
特点:
1
、所选择的频率有利于测定多普勒频移
2
、所选
择的频率有利于减弱信号所受的电离层折射影响 3、选择
两个频率可以较好地消除信号的电离层折射延迟(电离层
折射延迟与信号的频率有关)
GPS 卫星信号结构---测距码
作用:测距:通过测时实现测距。
性质 1、伪随机噪声码(PRN - Pseudo Random Noise);
2、不同的码(包括未对齐的同一组码)间的相关系数为
0
或
1/n
(
n
为码元数);
3
、对齐的同一组码间的相关系
数为 1;4、GPS 信号中使用了伪随机码编码技术,识别和
分离各颗卫星信号,并提供无模糊度的测距数据。
伪随机噪声码测距原理
卫星发射一伪随机噪声码,而接收机内也产生一伪随机噪
声码,且两个码序列是相同的
m
序列,时间也是精确同
步的。
当卫星信号经过传播距离的时间延迟ﺡ到达接收机,与本
地复制码进行相关处理时,移动本地码,使相关函数达到
最大值,本地码所移动的延迟值就是卫星信号的传播延迟
ﺡ(传播时间),它乘上光速即为所测距离。
GPS 卫星信号结构---C/A 码和 P 码
1、是两种 RPN 序列。
2
、其作用相当于测距中的定时信号。
3
、
C/A
码
(Coarse/Acquisition Code
,粗码
/
捕获码
):
是一种
短码,码率为 f0/10=1.023Mbps,周期为 1ms。
4、 P 码(Precise Code ,精 码)是一 种长 码, 其码率 为
f0=10.23Mbps
。
GPS 卫星信号结构---导航电文
导航电文是卫星以二进码的形式发送给用户的导航定位
数据,又称为数据码(
D
码)
1、每帧导航电文由 1500 位组成,分为 5 个子帧。每个子
帧 10 个字,每字 30 位。全部导航电文共分 25 帧,发送
完毕需要 12.5min。
2
、主要内容: 向用户提供卫星轨道参数、卫星钟参数、
大气延时改正参数、卫星状态信息、C/A 码转换到捕获 P
码的信息、全部卫星的概略星历等。
GPS
信号构成图
卫星信号的调制
P 码调制在 L1 和 L2 载波上,而 C/A 码仅调制在 L1 载波上
而且与 P 码相位相差 90 度。
GPS
卫星发射的信号为:
——————————四—————————————
GPS
定位原理—概述
GPS
利用
TOA
(
Time of Arrival
)测距以确定用户位置。借
助于对多颗卫星的 TOA 测量,便可得到用户位置。 GPS
定位的基本几何原理为三球交会原理。
GPS
系统的定位过程可描述为
:
围绕地球运转的人造卫星连续向地球表面发射经过编码
调制的连续无线电信号,信号中含有卫星信号准确的发射
时间,以及不同的时间卫星在空间的准确位置(由卫星运
动的星历参数和历书参数描述
)
;
卫星导航接收机接收卫星发出的无线电信号,测量信号的
到达时间,计算卫星和用户之间的距离;用导航算法解算
得到用户的位置。
测距方法(双程测距:用于电磁波测距仪;单程测距:用
于 GPS)(两种方法:伪随机码测距和载波相位测距)
利用测距码测距:基本思路:
D=
△
t *C
信号(测距码)传播时间的测定:
利用测距码测距的必要条件:必须了解测距码的结构(每
颗
GPS
卫星都采用特定的伪噪声随机码)
.
利用测距码进行测距的 优点: 1.采用的是 CDMA(码分多
址)技术
;2.
易于捕获微弱的卫星信号
;3.
可提高测距精度
;4.
便于对系统进行控制和管理(如 AS)
伪距测量的特点:
优点:无模糊度;缺点:精度低(相比载波相位测距)
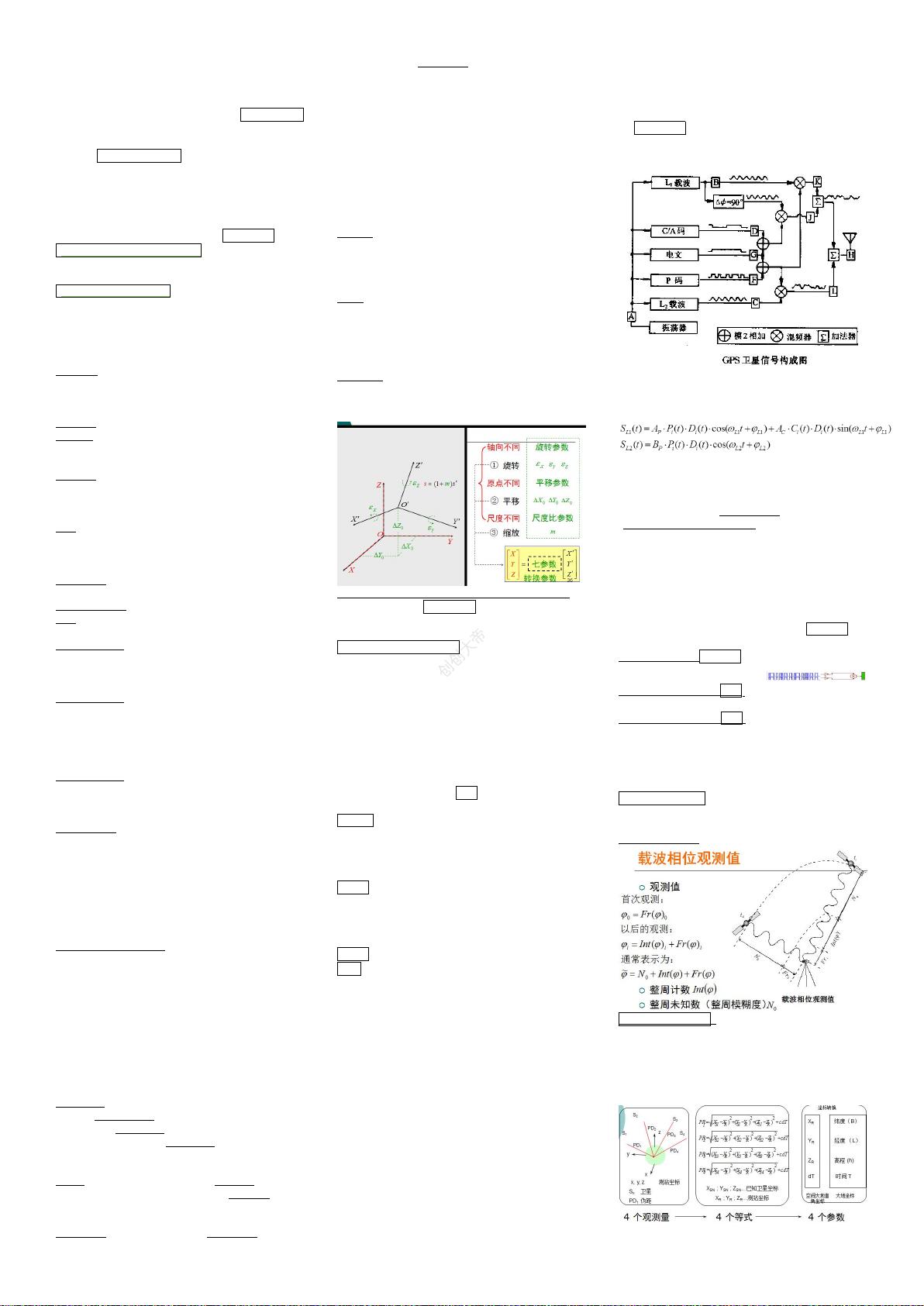
载波相位测距
载波相位测距原理: 卫星 t 时刻发送相位为φ(t)的载波,
接收机
k
时刻接收载波相位为φ
(k)
,则用户到卫星的伪距
ρ
=
λ
(
φ
(t) -
φ
(k) ) / 2
π
载波相位观测值:
载波相位测量的特点:优点:精度高,测距精度可达 0.1mm
量级;难点:整周未知数问题、整周跳变问题;
伪随机码测距与载波相位测距比较
由于信号量测精度一般优于波长的 1/100,所以载波
的测量精度远远高于伪随机码。
——————————五—————————————
GPS 解算过程
创创大帝
资源评论

 xxldweller2023-06-26资源值得借鉴的内容很多,那就浅学一下吧,值得下载!
xxldweller2023-06-26资源值得借鉴的内容很多,那就浅学一下吧,值得下载!- m0_684757472023-05-31支持这个资源,内容详细,主要是能解决当下的问题,感谢大佬分享~
- Keisei_Skyliner2024-05-24发现一个超赞的资源,赶紧学习起来,大家一起进步,支持!













