



Engineering Applications of Artificial Intelligence 87 (2020) 103300
Contents lists available at ScienceDirect
Engineering Applications of Artificial Intelligence
journal homepage: www.elsevier.com/locate/engappai
Manta ray foraging optimization: An effective bio-inspired optimizer for
engineering applications
Weiguo Zhao
a,b
, Zhenxing Zhang
b
, Liying Wang
a,
∗
a
School of Water Conservancy and Hydropower, Hebei University of Engineering, Handan, Hebei, 056021, China
b
Illinois State Water Survey, Prairie Research Institute, University of Illinois at Urbana-Champaign, Champaign, IL 61820, USA
A R T I C L E I N F O
Keywords:
Global optimization
Engineering design
Manta ray foraging optimization
Metaheuristic
Constrained problems
Optimization algorithm
Heuristic algorithm
A B S T R A C T
A new bio-inspired optimization technique, named Manta Ray Foraging Optimization (MRFO) algorithm,
is proposed and presented, aiming to providing a novel algorithm that provides an alternate optimization
approach for addressing real-world engineering issues. The inspiration of this algorithm is based on intelligent
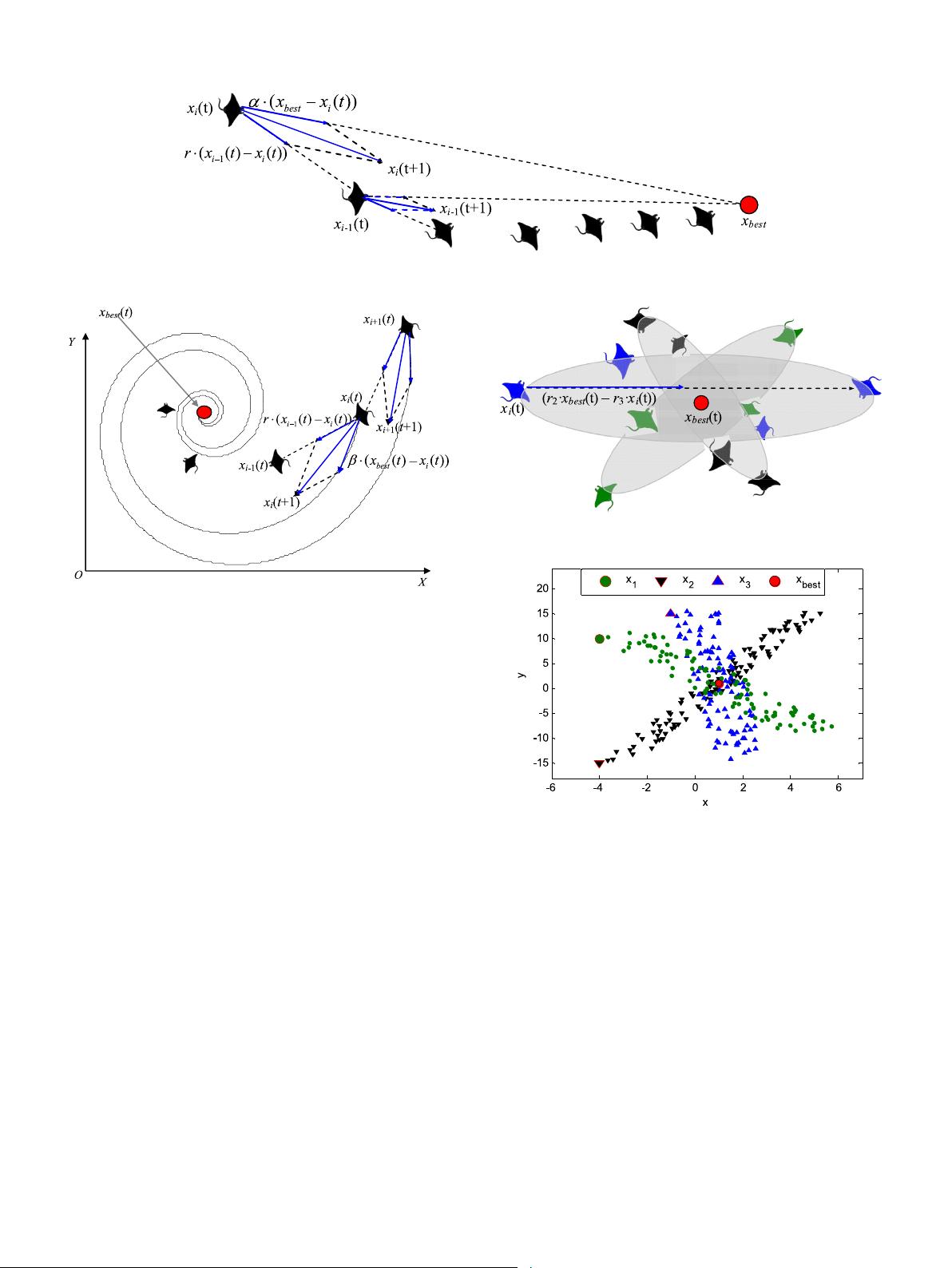
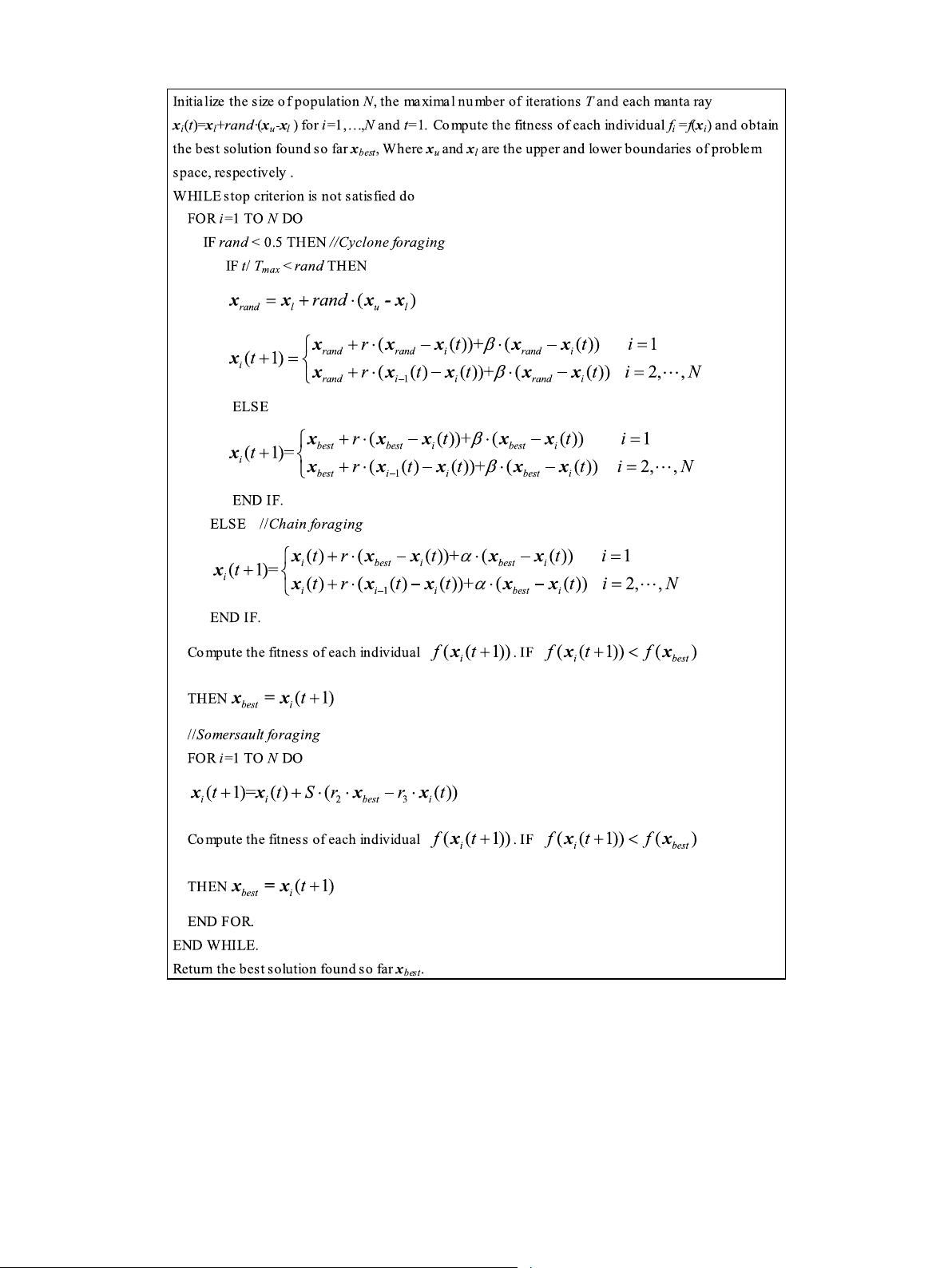
behaviors of manta rays. This work mimics three unique foraging strategies of manta rays, including chain
foraging, cyclone foraging, and somersault foraging, to develop an efficient optimization paradigm for solving
different optimization problems. The performance of MRFO is evaluated, through comparisons with other state-
of-the-art optimizers, on benchmark optimization functions and eight real-world engineering design cases. The
comparison results on the benchmark functions suggest that MRFO is far superior to its competitors. In addition,
the real-world engineering applications show the merits of this algorithm in tackling challenging problems in
terms of computational cost and solution precision. The MATLAB codes of the MRFO algorithm are available
at https://www.mathworks.com/matlabcentral/fileexchange/73130-manta-ray-foraging-optimization-mrfo.
1. Introduction
Many real-world optimization problems are increasingly becoming
challenging as they often concern a big number of decision variables,
complex nonlinear constraints and objective functions. The global opti-
mization using traditional approaches like numerical methods becomes
less powerful especially when objective functions or constraints have
multiple peaks. Metaheuristic algorithms, powerful tools for handling
challenging optimization problems, are increasingly becoming popular.
The popularity drives from the following aspects.
First, the most outstanding characteristic of metaheuristic algo-
rithms is their simplicity. These metaheuristic methods possess basic
theories or mathematical models which derive from nature. These
methods are generally simple and easy to implement. The ease-to-
use allows one to apply metaheuristics to solve real-world problems.
Moreover, it is also easy to develop their variants according to existing
methods. Second, these optimization technologies can be viewed as
a black box, meaning that it is able to offer a set of outputs for a
given problem for a set of inputs. Furthermore, scholars may eas-
ily modify the structures and parameters of these methods in order
to obtain satisfactory solutions. Third, randomness is one the most
important characteristics of metaheuristic algorithms. This allows meta-
heuristic algorithms to explore the entire search space and prevent
them from trapping into local optima effectively. More specially, it
makes many metaheuristics successful to solve problems with unknown
∗
Corresponding author.
E-mail addresses: zhaoweiguo@hebeu.edu.cn (W. Zhao), zhang538@illinois.edu (Z. Zhang), wangliying@hebeu.edu.cn (L. Wang).
search space or multiple local optima. Finally, these metaheuristics are
highly versatile and flexible, implying their practicability to various
different types of optimization problems including non-linear prob-
lems, non-differentiable problems, or complex numerical problems with
plentiful of local minima. Many metaheuristic algorithms have been
presented and successfully applied to different areas. These algorithms
are mainly categorized into three classes (Hare et al., 2013): evolution-
based (Mühlenbein et al., 1988), physics-based (Geem et al., 2001), and
swarm-based (Krause et al., 2013).
Evolution-based algorithms simulate natural evolution like chemo-
taxis, reproduction elimination and dispersal, and migration (Passino,
2002; De Falco et al., 2012). Genetic algorithm (GA), proposed by
Holland (1975), is a famous and widely used evolutionary algorithm
(EA). One of the main features of GA is that it does not require deriva-
tive in the search space that is existing in mathematical optimization
approaches. GA evolves a population by emulating survival of the
fittest in nature, it may provide efficient solutions and avoid local
optima. Since its emergence, a range of variants have been developed to
improve GA. With its popularity, many other evolutionary algorithms,
including differential evolution (DE) (Rocca et al., 2011), evolutionary
programming (EP) (Juste et al., 1999), evolutionary strategies (ES)
(Beyer and Schwefel, 2002), memetic algorithm (MA) (Moscato et al.,
2007), and so on, have been proposed. In addition, scores of novel
https://doi.org/10.1016/j.engappai.2019.103300
Received 21 December 2018; Received in revised form 17 September 2019; Accepted 14 October 2019
Available online xxxx
0952-1976/© 2019 Elsevier Ltd. All rights reserved.















评论3