

Point-Based Multi-View Stereo Network
Rui Chen
1,3*
Songfang Han
2,3*
Jing Xu
1
Hao Su
3
1
Tsinghua University
2
The Hong Kong University of Science and Technology
3
University of California, San Diego
chenr17@mails.tsinghua.edu.cn shanaf@connect.ust.hk
jingxu@tsinghua.edu.cn haosu@eng.ucsd.edu
before ow after ow
PointFlow
Dynamic Feature Fetching
Coarse prediction Rened prediction Final prediction
GT
surface
GT
surface
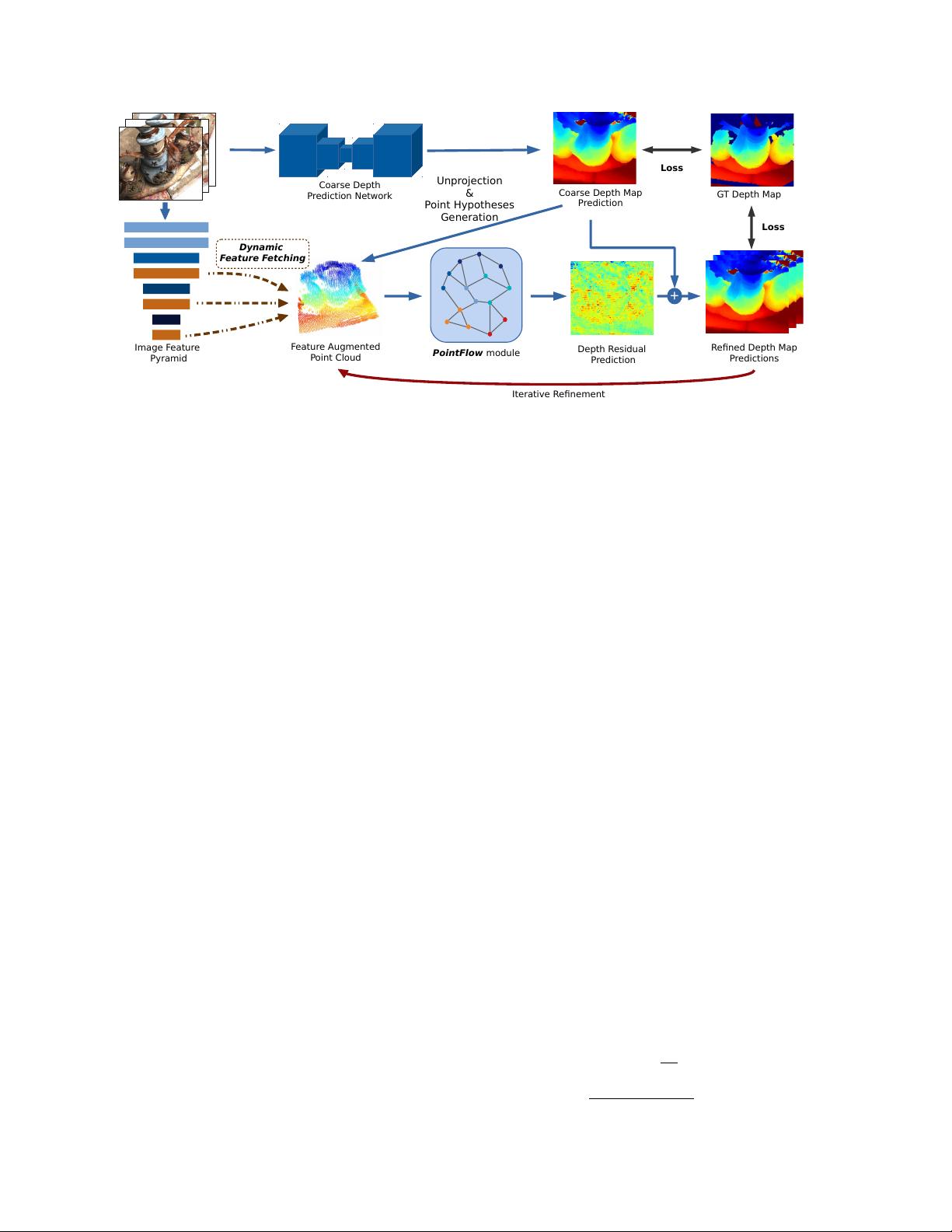
Figure 1: Point-MVSNet performs multi-view stereo reconstruction in a coarse-to-fine fashion, learning to predict the 3D flow of each point
to the groundtruth surface based on geometry priors and 2D image appearance cues dynamically fetched from multi-view images and regress
accurate and dense point clouds iteratively.
Abstract
We introduce Point-MVSNet, a novel point-based deep
framework for multi-view stereo (MVS). Distinct from
existing cost volume approaches, our method directly
processes the target scene as point clouds. More specifically,
our method predicts the depth in a coarse-to-fine manner.
We first generate a coarse depth map, convert it into a point
cloud and refine the point cloud iteratively by estimating
the residual between the depth of the current iteration
and that of the ground truth. Our network leverages 3D
geometry priors and 2D texture information jointly and
effectively by fusing them into a feature-augmented point
cloud, and processes the point cloud to estimate the 3D flow
for each point. This point-based architecture allows higher
accuracy, more computational efficiency and more flexibility
than cost-volume-based counterparts. Experimental results
show that our approach achieves a significant improvement
in reconstruction quality compared with state-of-the-art
methods on the DTU and the Tanks and Temples dataset.
Our source code and trained models are available at
https://github.com/callmeray/PointMVSNet.
*
Equal contribution.
1. Introduction
Recent learning-based multi-view stereo (MVS)
methods [
12
,
29
,
10
] have shown great success compared
with their traditional counterparts as learning-based
approaches are able to learn to take advantage of scene
global semantic information, including object materials,
specularity, and environmental illumination, to get more
robust matching and more complete reconstruction. All
these approaches apply dense multi-scale 3D CNNs to
predict the depth map or voxel occupancy. However, 3D
CNNs require memory cubic to the model resolution,
which can be potentially prohibitive to achieving optimal
performance. While Maxim et al. [
24
] addressed this
problem by progressively generating an Octree structure,
the quantization artifacts brought by grid partitioning
still remain, and errors may accumulate since the tree is
generated layer by layer.
In this work, we propose a novel point cloud multi-view
stereo network, where the target scene is directly processed
as a point cloud, a more efficient representation, particularly
when the 3D resolution is high. Our framework is composed
of two steps: first, in order to carve out the approximate
object surface from the whole scene, an initial coarse depth
map is generated by a relatively small 3D cost volume and
1
arXiv:1908.04422v1 [cs.CV] 12 Aug 2019

剩余12页未读,继续阅读
资源评论


三十度角阳光的问候
- 粉丝: 2208
- 资源: 352









最新资源
- CC2530无线zigbee裸机代码实现液晶LCD显示.zip
- CC2530无线zigbee裸机代码实现中断唤醒系统.zip
- 车辆、飞机、船检测24-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 基于51单片机的火灾烟雾红外人体检测声光报警系统(protues仿真)-毕业设计
- 高仿抖音滑动H5随机短视频源码带打赏带后台 网站引流必备源码
- 车辆、飞机、船检测25-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 四足机器人示例代码pupper-example-master.zip
- Python人工智能基于深度学习的农作物病虫害识别项目源码.zip
- 基于MIT mini-cheetah 的四足机器人控制quadruped-robot-master.zip
- 菠萝狗四足机器人py-apple-bldc-quadruped-robot-main.zip
- 基于51单片机的篮球足球球类比赛计分器设计(protues仿真)-毕业设计
- 第3天实训任务--电子22级.pdf
- 基于FPGA 的4位密码锁矩阵键盘 数码管显示 报警仿真
- 车辆、飞机、船检测5-YOLO(v5至v11)、COCO、CreateML、Paligemma、VOC数据集合集.rar
- 河南大学(软工免浪费时间)
- NOIP-学习建议-C++
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


