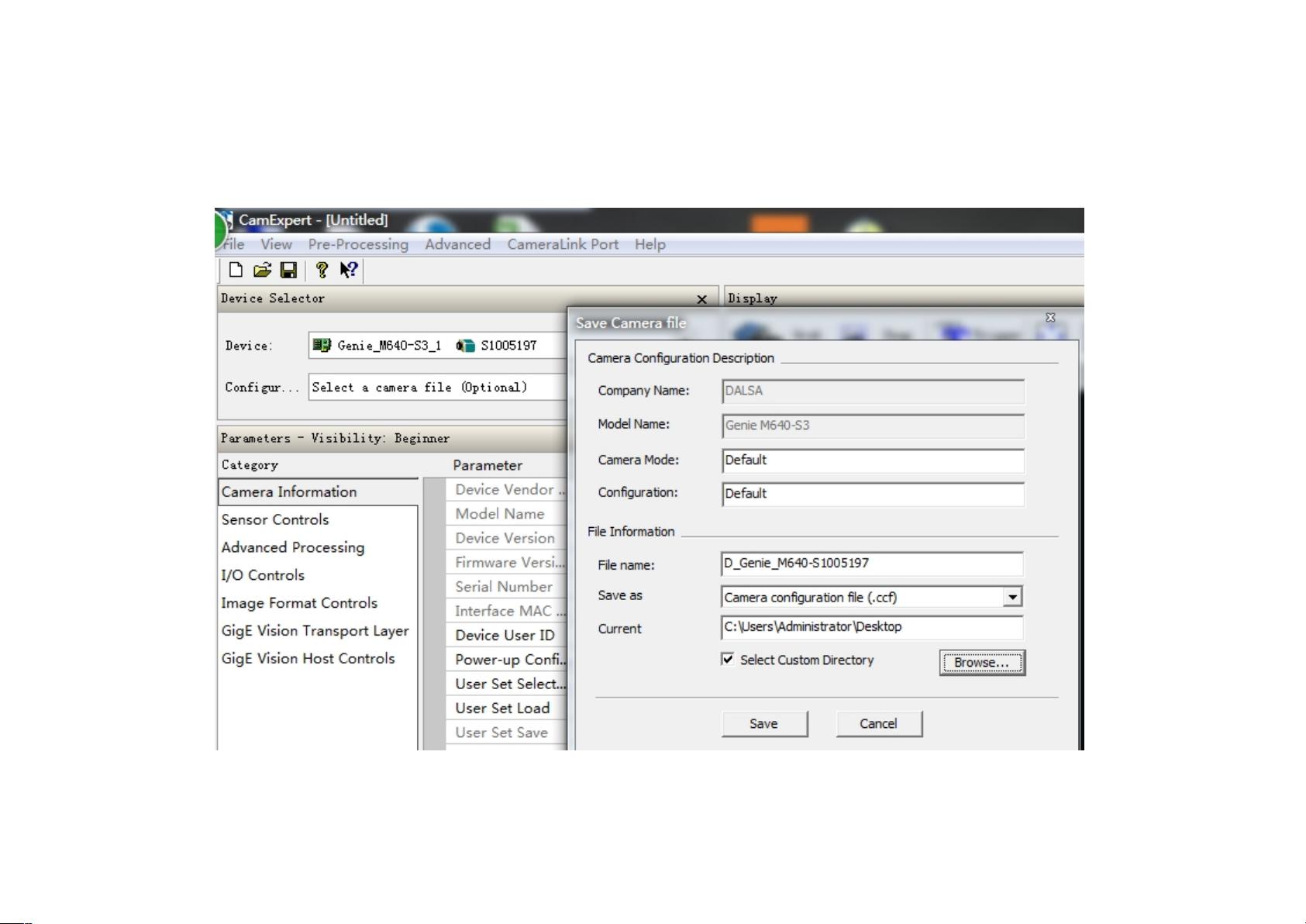
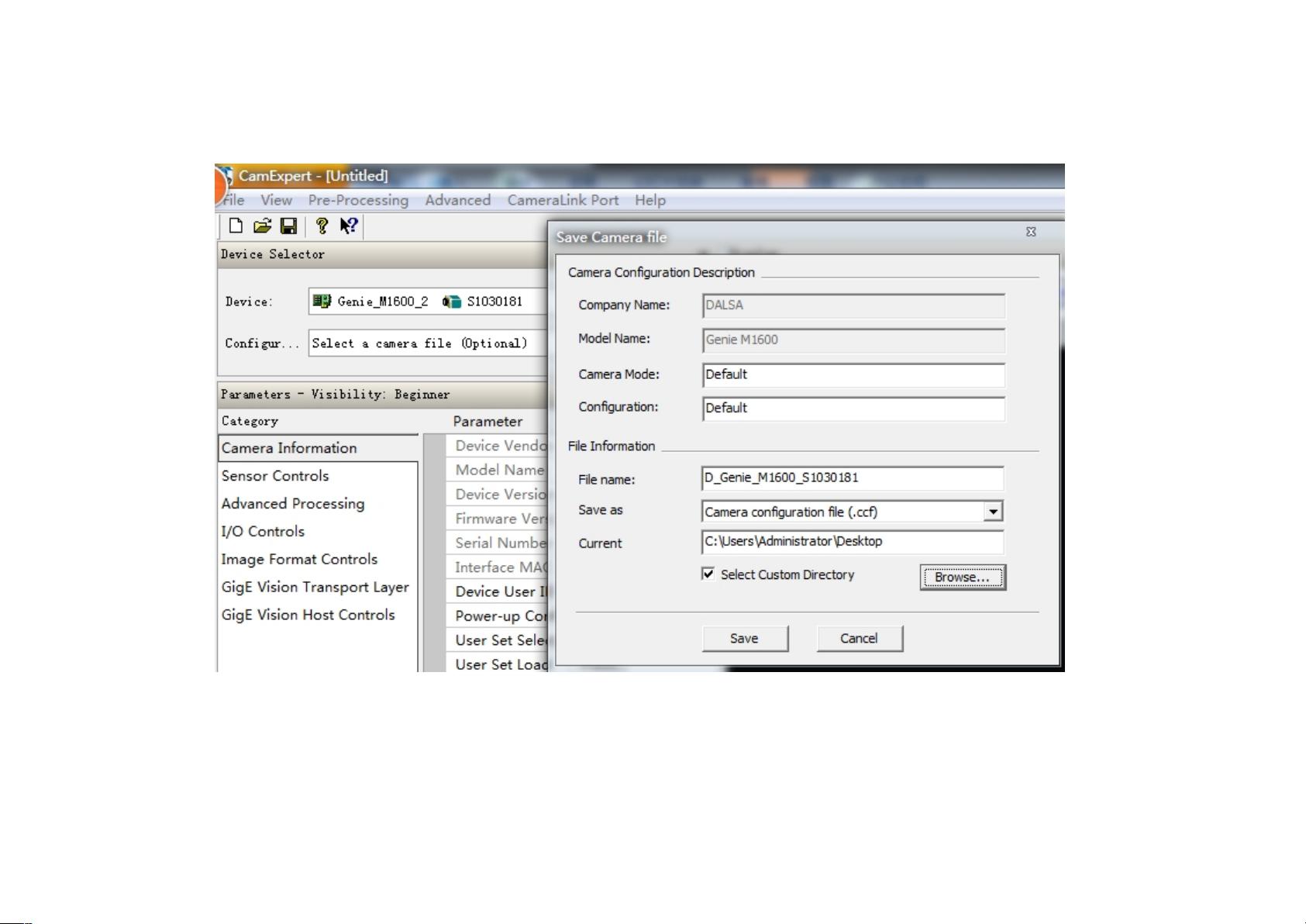
sherlock实现多线程运行的方法 sherlock是一款功能强大、具有多线程运行能力的计算机视觉软件,主要应用于工业自动化、机器视觉等领域。为了满足多线程运行的需求,sherlock提供了多种配置方式,下面我们将详细介绍sherlock实现多线程运行的方法。 配置要求 在开始配置之前,需要准备以下设备: * 两个相机 * 3条千兆网线 * 一个千兆交换机 * 一个sherlock加密狗 * 一台PC(32位win7系统) * sherlock软件版本7180及以上 配置步骤 Step 1: 分别对连接到PC的每个相机做配置文件 对每个相机进行配置文件的创建,并将其存储到指定文件夹中。注意:对应的配置文件一定要指向对应的相机,可以把配置文件名称命名成包含该相机序列号的名字,以方便记忆。 Step 2:拔掉一个相机的网线,并连接到PC 拔掉一个相机的网线,只留一个相机与PC接通,然后启动相机配置文件导入程序:开始菜单——所有程序——Teledyne DALSA——sherlock——Sapera Acquisition Wizard Step 3: 导入当前接通的相机配置文件 导入当前接通的相机配置文件,然后点击右边的“Save As”,把当前配置另存到弹出的默认地址,并将名称命名为“SaperaLTDrv1.ini”。确保导入的配置文件与当前相机对应。 Step 4:拔掉刚做好配置文件的相机网线,重新连接第二个相机 拔掉刚做好配置文件的相机网线,重新连接第二个相机,然后重复Step 3,完成第二个相机配置文件的导入。注意:另存到默认路径的配置文件名称,命名为“SaperaLTDrv2.ini”。 Step 5:完成两个相机配置文件设置 完成两个相机配置文件设置后,把两个相机的网线正常连接上,确保两个相机均正常。 多线程运行 Step 6: 打开一个空白的sherlock程序窗口 在win7的搜索栏下输入如下命令:“C:\Program Files\Teledyne DALSA\Sherlock\Bin\IpeStudio.exe -acq:Drivers1.ini -load: t.ivs”,即可打开一个空白的sherlock程序窗口,该窗口调用的是1号相机图片,调用的是1号相机配置文件。 Step 7: 打开第二个空白的sherlock程序窗口 在win7的搜索栏下输入如下命令:“C:\Program Files\Teledyne DALSA\Sherlock\Bin\IpeStudio.exe -acq:Drivers2.ini -load: t.ivs”,即可打开一个空白的sherlock程序窗口,该窗口调用的是2号相机图片,调用的是2号相机配置文件。 实验结果 通过上述步骤,我们可以实现sherlock多线程运行的方法,一个软件,同时打开多个程序窗口,各自独立运行,互不干扰。这种方法可以满足多种工业自动化和机器视觉应用的需求。 结论 sherlock实现多线程运行的方法可以满足多种工业自动化和机器视觉应用的需求,为用户提供了更多的选择和灵活性。通过正确的配置和设置,可以实现多个程序窗口的同时打开,提高了工作效率和生产力。
剩余14页未读,继续阅读
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~